基礎的学習内容を共有する機械学習ユニット

学んだことを共有するAIたち
AIに必須の機能である、機械学習に関しては、これまでにも多くの特許が存在しています。特に、複数のAIの関係については、各AIが有する学習モデルと他のAIが有する学習モデルとが類似する場合に、これらの学習モデル全体を合成することによって学習効率を向上させる技術が知られていました。 しかし、昨今AIの普及に伴い、さらに効率的な機械学習を行わせるためのシステムが必要とされています。
そこで、学習装置ユニットに、少なくとも1つの学習装置と、これとは別に、他の学習装置ユニットと共有される部分を有する中間学習装置を備えることとしました。このような構成として、中間学習装置同士を一定の頻度で通信させ、他のユニットと共有をはかることにより、各装置が新しく学んでいる情報と、他の装置が学んで中間学習装置に格納した情報とを同時に処理するほか、個体に固有の情報と、他の個体との間で共有できる情報とを分けて処理することができ、従来よりも効率よく全体の学習成果が向上するというわけなのです。
このような学習装置ユニットは、具体的な適用においては多くの場面が考えられ、例えば自動車関連では、複数の自動車のセンサ情報を効率的に活用すること、製造業においては複数の製造装置・ロボットからの情報を入力し、プロセスの最適化などが図られることなどが期待されます。
以上のような、多くの個体(機器)に搭載された学習装置ユニットが情報を適時に共有することで、これまでのような、各個体が独立に大量にデータを貯めて学習を実行する場合に比べて、より短い時間で学習ができるとのことです。より効率的なAIの学習システムによって、仕事の自動化・スピードアップが実現できるといいですね。
■従来の課題
人工知能を構成する技術の1つとして、機械学習が知られています。人工知能は、例えば、画像認識・翻訳・自動運転などの分野に応用されつつあります。機械学習は、人工知能をさらに発展させるために、さらなる進化が期待されている技術です。
従来、機械学習を利用した学習装置に関連する技術が知られています。特許出願された内容を公開した公開公報においても、学習装置に関する様々な技術が開示されています。しかし、効率的な機械学習を行うことができる学習装置が今も要望されています。
本発明は、上記の問題に鑑みてなされたものであり、効率的な機械学習を行うことができるシステムと、コンピュータプログラムを提供することを目的とします。
■本発明の効果
本発明は、機械学習を用いた学習装置に関し、複数の学習装置ユニットを含むシステム、および、そのシステムを実行するためのコンピュータプログラムに関するものです。本発明では、実に効率的な機械学習を行うことができます。
■特許請求の範囲のポイントなど
本発明のポイントを下記に示す。
本発明の特許請求の範囲における概要を説明します。本発明のシステムは、自動車、製造ロボット、農業、センサなどに応用できるシステムです。
詳細は、後で詳細にご説明しますが、本発明によって、実に効率的な機械学習を行うことができます。
具体的には、複数の学習装置ユニットのうち、1つの学習装置ユニットが学習した情報を、他の学習装置ユニットと共有することができます。よって、効率的に機械学習を進めることができます。
■全体構成
本発明の特許請求の範囲には、大きく分けて、「複数の学習装置ユニットを含むシステム」の発明と、上記システムを実行するための「コンピュータプログラム」の発明とが記載されています。
実施される具体例を概説しますと、以下の通りです。
例えば、食品工場の製造プロセスに上記のシステム等を応用した場合、ベルトコンベアで移動してくる丸型のケーキ及び四角型のケーキに対してそれぞれクリーム及びイチゴを乗せる作業に適用できます。
ベルトコンベア上で撮影された各ケーキの画像を解析し、「クリームを乗せる」、「イチゴを乗せる」、「不良品をはじく」、「ラインを止める」といった判断をさせることができます。より正確にこの判断を実行させるように学習することが可能です。
まず、「複数の学習装置ユニットを含むシステム」について説明します。
本発明の「システム」は、複数の学習装置ユニットを含むシステムです。
各学習装置ユニットは、入力側に配置された入力側学習装置、及び、出力側に配置された出力側学習装置の両方か、又は、いずれか一方と、中間学習装置と、中間学習装置の内部状態の情報を通信するための通信手段とを備えます。
少なくとも1つの中間学習装置は、他の学習装置ユニットの中間学習装置の内部状態(アルゴリズムのようなもの)を、通信手段によって共有するように構成されています。
ただし、各学習装置ユニットは、他の学習装置ユニットの中間学習装置と内部状態を共有する前、共有した後、の両方において、通信手段によって通信しなくても独立して学習を実行できるように構成されています。
また、上記システムを実行するための「コンピュータプログラム」の発明の内容も、上記の内容と同様です。
■細部
本発明の特許請求の範囲には、さらに、下位概念の発明として、以下のような内容の発明も記載されています。上記「システム」は、好ましくは以下のように設計されています。
★上記システムは、好ましくは、すべての学習装置ユニットにアクセス可能な記憶装置(データベースなど)を備えます。各学習装置ユニットの中間学習装置は、その記憶装置から内部状態の情報を取得して、他の学習装置ユニットの中間学習装置と内部状態を共有します。
なお、内部状態を構成する情報は、「重みW」を含みます。これについては、後に説明します。
★上記システムにおいて好ましくは、各学習装置ユニットが、自動車、産業機器、ロボット、温室制御装置、センサと制御装置とを有する機器などに搭載されます。
このような発明を実施するための具体例について、以下に説明します。
■実施形態
図1は、学習装置ユニットが用いられるシステムの構成例を示す模式図です。

【図1】
図1に示すように、このシステム1は、学習装置ユニット10-1~10-Nと、通信回線20に接続されるサーバ装置30と、測定装置40と、出力装置50と、を含みます。学習装置ユニット10-1~10-Nは、それぞれ、学習装置ユニット10-1~10-Nのうちの他の学習装置ユニット及びサーバ装置30と通信回線20によって情報通信することが可能です。
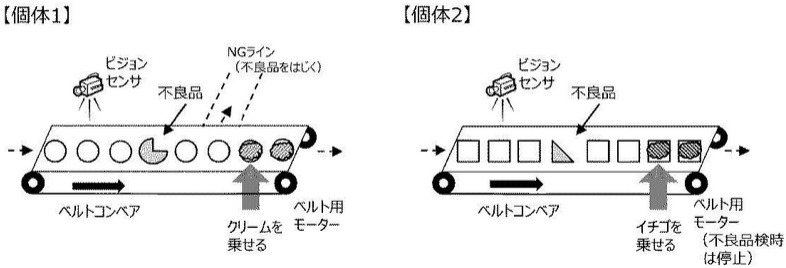
次に、図7に基づいてさらに詳しく説明します。図7は、上述したように、上記のシステムを食品工場に応用した例を説明するための模式図です。ベルトコンベアに乗せられて移動してくる丸型のケーキ、四角型のケーキに、それぞれクリーム及びイチゴを乗せる作業をします。
【図7】
図7(a)に示すように、個体1の学習装置ユニットは、丸型のケーキにクリームを乗せる作業を実施します。図7(b)に示すように、個体2の学習装置ユニットは、四角型のケーキにイチゴを乗せる作業を実施します。
各学習装置ユニットは、ビジョンセンサによって得た入力情報(ケーキの画像)を基にして「物品検出」及び「良品/不良品判定」を行います。
個体1の学習装置ユニットは、ケーキが不良品であると判定した場合に、そのケーキをベルトコンベアからはじき出しますが、ケーキが良品であると判定した場合には、そのケーキの上にクリームを乗せます。
一方、個体2の学習装置ユニットは、ケーキが不良品であると判定した場合に、ラインを止めますが、ケーキが良品であると判定した場合には、そのケーキの上にイチゴを乗せます。
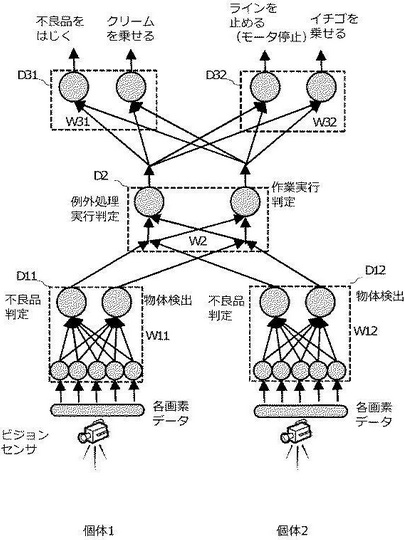
図8に、2つの個体(個体1の学習装置ユニット、個体2の学習装置ユニット)が用いられた例を示します。両方の個体において、入力される情報は、ビジョンセンサの画像データ(ケーキの画像)です。出力される情報は、個体1において「不良品をはじく」及び「クリームを乗せる」であり、個体2において、「ラインを止める」及び「イチゴを乗せる」です。
【図8】
まず、学習装置1(入力側学習装置)に着目します。
図8に示すように、個体1の学習装置ユニットにおいて、入力側学習装置D11は、ビジョンセンサの画像データを入力し、入力を基にして変換した数値等を出力します。この入力側学習装置D11は、学習した後、物体がベルトコンベア上を移動してきたことを検出する機能と、その物体が正常な丸型の形状を有するものであるか否かを判定する機能とを分担できると仮定します。
また、個体2の学習装置ユニットにおいて、入力側学習装置D12は、ビジョンセンサの画像データを入力し、入力を基にして変換した数値等を出力します。この入力側学習装置D12は、学習した後、物体がベルトコンベア上を移動してきたことを検出する機能と、その物体が正常な四角型の形状を有するものであるか否かを判定する機能とを分担できると仮定します。
すなわち、それぞれの学習装置ユニットが異なる処理を分担できると仮定します。
次に、学習装置2(中間学習装置)に着目します。
図8に示すように、中間学習装置D2は、入力側学習装置D11、D12の各出力を入力し、入力を基にして変換した数値等を出力します。
この中間学習装置D2は、学習した後、例外処理(不良品に対する処理)を行うかどうかを判定する結果と、正常品に対する次の作業(製造プロセス)を実行するかどうかを判定する結果と、を表現できると仮定します。
続いて、学習装置3(出力側学習装置)に着目します。
個体1の学習装置ユニットの出力側学習装置D31は、中間学習装置D2の出力を入力し、「不良品をはじく」及び「クリームを乗せる」を出力します。
一方、個体2の学習装置ユニットの出力側学習装置D32は、中間学習装置D2の出力を入力し、「ラインを止める」及び「イチゴを乗せる」を出力します。不良品については、出力側学習装置D31は「不良品をはじく」という指示を示す信号を出力し、出力側学習装置D32は「ラインを止める」という指示を示す信号を出力します。一方、正常品については、出力側学習装置D31は「クリームを乗せる」という指示を示す信号を出力します。
ここで、「重み」について説明します。個体1の学習装置ユニット10-1で機械学習が行われた結果、入力された値の重要度(影響度)に応じて、入力された値(ベクトル)にそれぞれ異なる「重みW」が掛け算されて、出力されます。例えば「重みW」は、重要度が高ければ0.9(90%)、重要度が低ければ0.1(10%)というイメージです。各学習装置の出力を考えるときに、「重みW」が図9に示された通りになっていると仮定し、個体1に搭載された学習装置ユニット10-1が「正しい物体」を検出したとします。
なお、図9では、入力側学習装置D11の重みW11が省略されていますが、物体検出を示す出力については、「1」が出力され、一方、「不良品判定」の出力については「0」が出力されます。
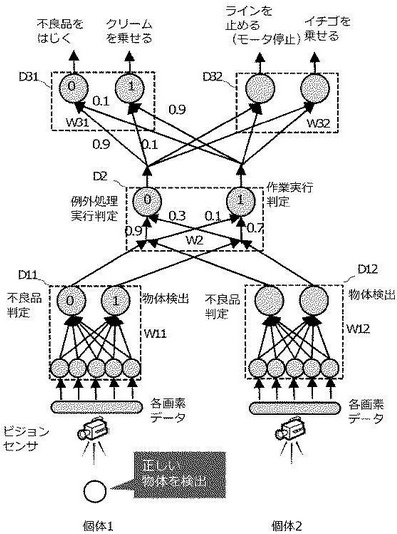
【図9】
中間学習装置D2では、「作業実行判定」を示す出力として「1」が出力され、「例外処理判定」を示す出力として「0」が出力されます。出力側学習装置D31では、「クリームを乗せる」を示す出力として「1」が出力され、「不良品をはじく」を示す出力として「0」が出力されます。
このように、正しい物体を検出した場合に「クリームを乗せる」という指示を示す信号が出力されます。
次に、図10を参照して、学習装置の「重み」が更新(変更)される様子を説明します。
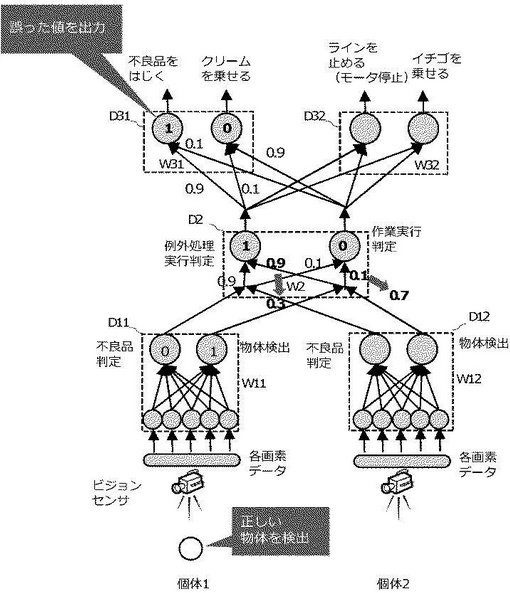
【図10】
ここで、入力側学習装置D11が「正しい物体」を検出したときに、出力側学習装置D31が「誤った出力を出してしまった」場合を考えます。図10に例示した通り、中間学習装置D2の「重みW2」が不適当な「重み」になっているため、中間学習装置D2の出力が不適当になり、その結果、出力側学習装置D31の出力を誤ったと仮定します。
この場合、図1に示すCPU11が、D31の出力結果と期待値との間の誤差を、「重み」に反映させます。これによって、各学習装置の「重み」がより正しくなるように学習が行われます。
図10には、一例として、W2において、入力側学習装置D11の「物体検出」を示す出力に掛け合わせられる2つの重み「0.9」及び「0.1」がそれぞれ「0.3」及び「0.7」に更新される様子が示されています。
このように更新された後は、入力側学習装置D11が「正しい物体」を検出したときに、出力側学習装置D31が「クリームを乗せる」という指示を示す信号を出力します。
次に、図11を参照して、個体2に搭載された学習装置ユニット10-2による検出動作及び学習について考えます。図11は、不良品を検出したときに「ラインを止める」という動作を行う場合の各学習装置の様子の一例を示しています。
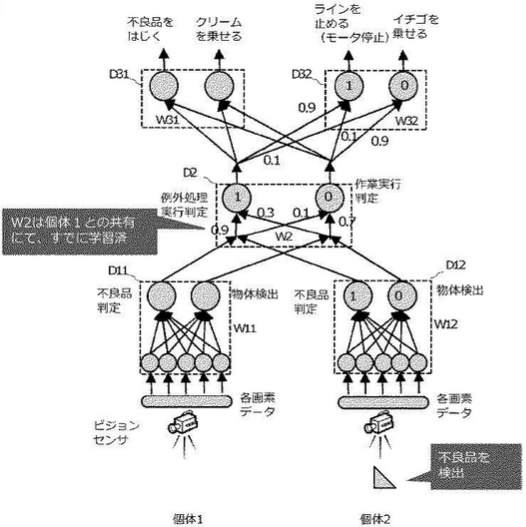
【図11】
中間学習装置D2は、個体1の学習装置ユニット10-1によって学習された「重みW2」をすでに持っています。この重みW2(すなわち、中間学習装置D2の内部状態)は、個体2の学習装置ユニット10-2にも共有されます。すなわち、極端にいえば、学習装置ユニット10-2それ自体は、実際に学習を行わなくとも、他の学習装置ユニットにより行われた学習により得られた中間学習装置D2の内部状態(重み)を利用して、「作業実行判定」及び「例外処理実行判定」を簡単かつ精度良く行うことができます。
さらなる工夫も可能です。図13は、学習装置ユニットを適用した別の具体例を詳細に説明する模式図です。
【図13】
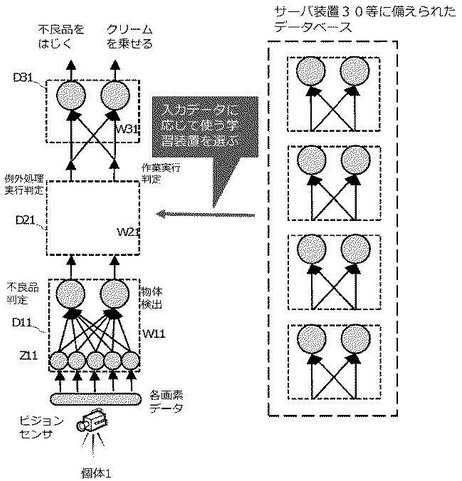
例えば図13に示すように、各学習装置ユニット(例えば個体1の学習装置ユニット10-1)の中間学習装置D21は、すでにある適当な「重み」(内部状態)を通信回線によって取得します。適当な「重み」とは、サーバ装置30等にあるデータベース(記憶装置)に保管された複数の重みの中から選択された重み(内部状態)です。これにより、中間学習装置D21は、選択された重み(内部状態)を利用することができます。
以下、本システムを応用できる分野の具体例を説明します。
(1)自動車
自動車に搭載されるカメラ、距離センサ、GPSなどのセンサ情報を入力とし、運転支援情報の提示や自動運転を行うことを出力とすることができます。この場合、各自動車から出力されるセンサ情報等を効率的に活用することができます。
(2)製造業
製造に用いられる複数の製造装置・ロボットからの情報を入力とし、これら製造装置・ロボットに与える指示を出力とすることができます。例えば、高度なロボット制御の実現や、プロセス最適化、異常の予知等において活用できます。
(3)農業
温室栽培における環境制御に適用可能であり、例えば、温室の外的環境変化に応じた環境制御の実現や、消費エネルギーの最小化、生産品種に応じた栽培方法の共有化等において活用できます。
(4)センサ・制御装置を有する機器全般
センサ情報の分析結果の提示や機器の制御等において活用できます。従来の手法に比べて、センサ情報の活用にかかる時間的コスト及び精度を改善することができます。
■展望、結語
以上ご説明しましたように、機械学習を用いた学習装置を複数含む本発明のシステム、および、そのシステムを実行するプログラムによって、効率的な機械学習を行うことができます。上述したような工夫が詰め込まれた本発明は、自ら判別や予測の精度を高めることができるため、将来的に注目できるものです。
■概要
出願国:日本 発明の名称:学習装置ユニット
出願番号:特願2015-115532(P2015-115532)
特許番号:特許第5816771号(P5816771)
出願日:2015年6月08日
公開日:2017年1月05日
登録日:2015年10月02日
出願人:株式会社Preferred Networks
経過情報:本出願は、審査において拒絶理由通知を1回受けたあと、手続補正書を提出することによって特許査定となり、特許となりました。
その他情報:本権利は抹消されていません。存続期間満了日は2035年6月8日です。なお、本特許出願を基礎出願にして、国際特許出願され、各国でも特許権を獲得する意向があるようです。
IPC:G06N
<免責事由>
本解説は、主に発明の紹介を主たる目的とするもので、特許権の権利範囲(技術的範囲の解釈)に関する見解及び発明の要旨認定に関する見解を示すものではありません。自社製品がこれらの技術的範囲に属するか否かについては、当社は一切の責任を負いません。技術的範囲の解釈に関する見解及び発明の要旨認定に関する見解については、特許(知的財産)の専門家であるお近くの弁理士にご相談ください。