仮想引力
リアルな宇宙を身近に!
夢とロマンに満ち溢れた宇宙空間、一度は旅をしてみたいと思ったことのある方も多いではないでしょうか?
現在では「Virtual Reality(仮想現実)」技術の登場により、宇宙をいるかのような体験ができるゲームも多く発売されています。
しかし現在の仮想宇宙空間では、遊んでいるうちに迷子になりやすいという難点ありました。
そこで、よりリアルな立体感とメリハリのある宇宙体験の実現という事で、「プログラム及びコンピュータシステム」が発明されました。本発明のポイントは、仮想宇宙空間の軸となる平面とプレイヤーとを紐付けられるようになった事。
また、仮想宇宙空間自体の回転が制御できるようになる事で、プレイヤーそれぞれの間隔と遠近がより明確に、またプレイヤー自身の操作もより簡単になりました。この発明によって、宇宙体験という夢への旅がよりリアルに、そしてより身近なものとなる事でしょう。
■従来の課題
仮想現実(VR)ゲームにおける「ゲーム空間の設定」は様々である。
例えば、ゲーム空間が「市街地、軍事施設及びその周辺地形」である場合には、これ以上先には行けない境界が設定されており、プレイヤーは地形を利用した作戦を検討する。
しかしながら、ゲーム空間が「宇宙或いは宇宙相当空間」である場合、地面や床面が無く、周囲の背景が似ており、空間の奥行きが深いため、自分の位置や姿勢を掴みにくく、自分がどっちにどれだけ移動したか、どういった姿勢でいるかが分かりにくい。このように相対位置の把握や方向感覚が不足することで、キャラクターがゲーム空間に散らばり過ぎる場合がある。結果として、市街地戦のような頻繁な攻防は起こらず、散漫なゲーム展開になってしまうという課題があった。
■本発明の効果
本発明によれば、ゲーム空間の設定を宇宙空間或いは宇宙相当空間とした場合に生まれる上記問題が低減される技術が提供される。具体的には、プレイヤーが自身の操作キャラクターの移動や姿勢のコントロールが容易にできるようになる技術、及びキャラクター同士の過度な分散によってゲーム進行が阻害されるのが防止される技術が提供される。
■特許請求の範囲のポイント
本発明のポイントを下記に示す。
「仮想3次元空間の画像を生成してゲームを実行させるためのプログラム及びコンピュータシステムであって、
・仮想3次元空間に、キャラクターが通過可能な基準面を設定する基準面設定手段としてプログラム及びコンピュータシステムを実行させ、
・キャラクターそれぞれに対して、基準面のどちら側に位置しているかに関わらず、基準面に近づける方向の力を作用させる助力制御を行う助力制御手段を有する、プログラム及びコンピュータシステム。
本発明の更なるポイントとして、
・助力制御手段は、基準面からの距離に応じて作用させる力の大きさを変化させる
・助力制御手段は、助力制御によるキャラクターの移動速度を、プレイヤーの移動操作入力に従ったキャラクターの移動速度の1/5以下とすること、が挙げられる。
■全体構成
本実施形態におけるゲームシステムの一例を図1に示す。
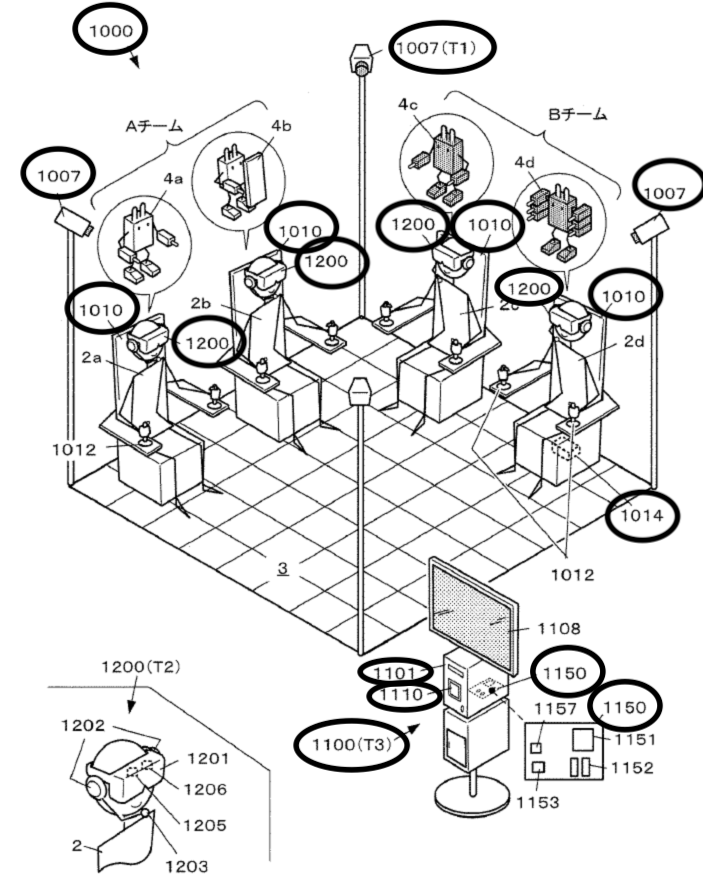
【図1】本実施形態におけるゲームシステムの一例
本実施形態のゲームシステム1000は、仮想現実体験(VR体験)をユーザーに提供する装置であり、VRゲームをマルチプレイで実行するための演算処理を担い、プレイに必要な入出力を実行するコンピュータシステムである。具体的には、プレイヤーが操縦席に着座して仮想のパイロットキャラクターとなり、仮想のロボット兵器や戦闘機といった乗り物を、宇宙空間という設定の仮想世界で操縦するVRゲームを提供する。
ゲームシステム1000は、現実世界におけるプレイエリア3と、プレイエリア3を撮影するトラッキングセンサユニット1007と、プレイエリア3に配置された複数の座席1010と、各座席1010に着座するプレイヤー2に対応付けられるVRゴーグル1200と、ゲーム制御装置1100を有する。
本実施形態では、トラッキングセンサユニット1007がカメラユニットを有する構成とし、複数のトラッキングセンサユニット1007が、プレイエリア3をステレオ撮影できるように配置されている。そして、各トラッキングセンサユニット1007は、VRゴーグル1200を撮影する。撮影された画像データは、ゲーム制御装置1100に出力される。撮影された画像データには、VRゴーグル1200に設けられた発光式のトラッキングマーカーが写されており、これを追跡対象としゲーム制御装置1100にて画像処理を行うことで、プレイエリア3内におけるVRゴーグル1200の位置と姿勢とを検出する。
座席1010には、ゲーム制御装置1100にて駆動制御されるバイブレータ1014が内蔵されており、ゲーム演出としての振動や、プレイヤーへの注意を促すことを目的とした振動を座席別に与えることができる。
ゲーム制御装置1100は、ゲームシステム1000に含まれるコンピュータシステムの1つである。本実施形態のゲーム制御装置1100は、本体装置1101と、タッチパネル1108とを有する。そして、本体装置1101は、媒体読取装置1110と、制御基板1150とを搭載する。
タッチパネル1108は、ゲームの紹介や操作説明等のアトラクション映像の表示と、プレイヤーの受け付け等の操作入力に用いられる。
媒体読取装置1110は、プレイヤー媒体の記録方式や通信方式に対応して、プレイヤー媒体に直接或いはプレイヤー媒体を介して、データを書き込んだりデータを読み出したりすることのできる装置である。
■細部
本実施形態では、第1に、プレイヤー操作キャラクターの過度な分散によりゲーム進行が阻害されるのを防止する「分散防止技術」と、第2に、キャラクターの移動や姿勢が容易にできるようになる「操作性向上技術」が適用されている。これら技術につき以下に詳しく説明する。
<分散防止技術>
本実施形態における分散防止技術の原理を図3に示す。
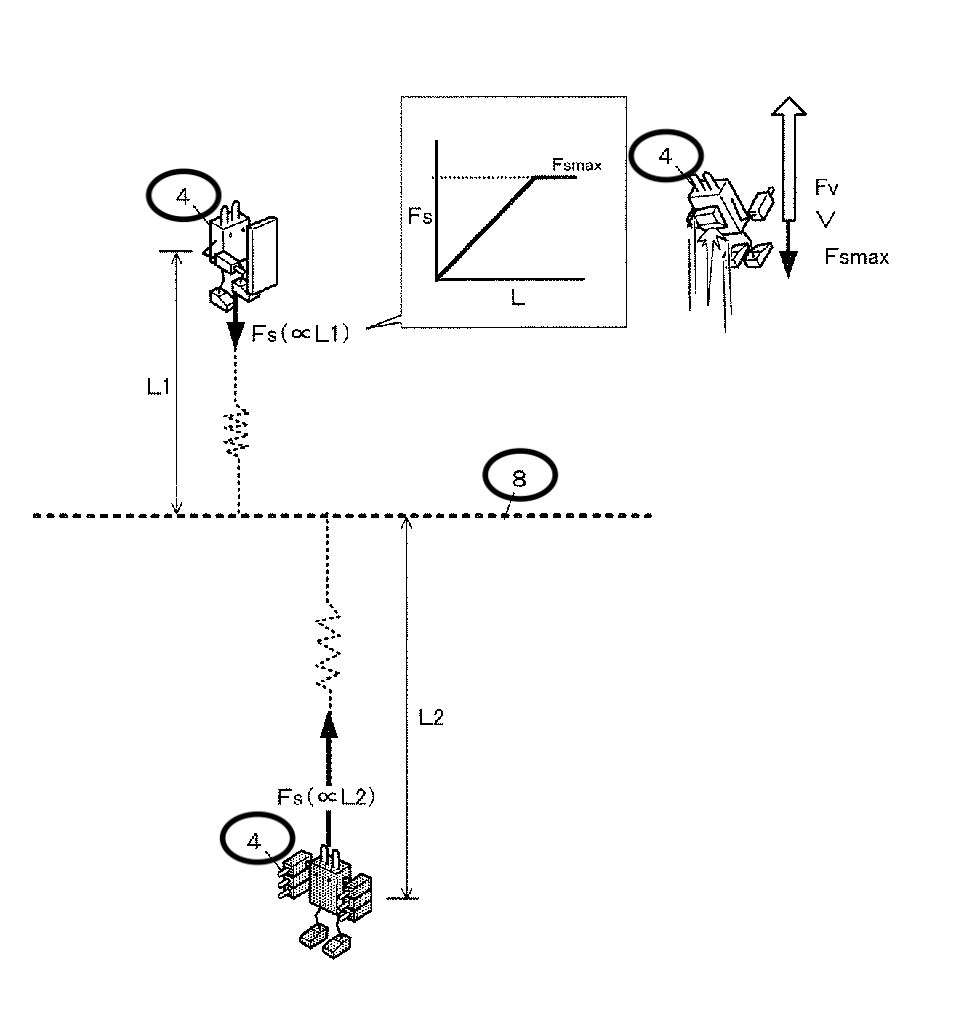
【図3】分散防止技術の原理の説明図
分散防止技術の要素の1つにゲーム空間の中に基準面8を設けることが挙げられる。 基準面8は、ゲーム空間中に設定された任意の点を通って、ゲーム空間6を横切る平面である。基準面8は、ゲーム内のオブジェクト(プレイヤー操作キャラクター4を含む)の移動は妨げない演算処理上の存在であり、基本的には不可視の設定であって、各オブジェクトは基準面8を通過することができる。よって、ゲーム画面中には通常は表示されない。但し、ペナルティを伴う所定の可視化操作をすると一時的に表示させることができる。
ゲームが開始されると、各プレイヤー操作キャラクター4に対し、基準面8のどちら側に位置しているかに関わらず、プレイヤー操作キャラクター4を基準面8に近づけるように作用する仮想吸引力Fsを作用させる。これを「助力制御」と言う。
仮想吸引力Fsは、プレイヤー操作キャラクター4の代表点から基準面8までの距離Lが大きくなるほど大きくなるように決定される。但し、仮想吸引力Fsには所定の最大値、最大吸引力Fsmaxが設定されている。
<操作性向上技術>
本実施形態における、操縦性向上の原理を図4に示す。
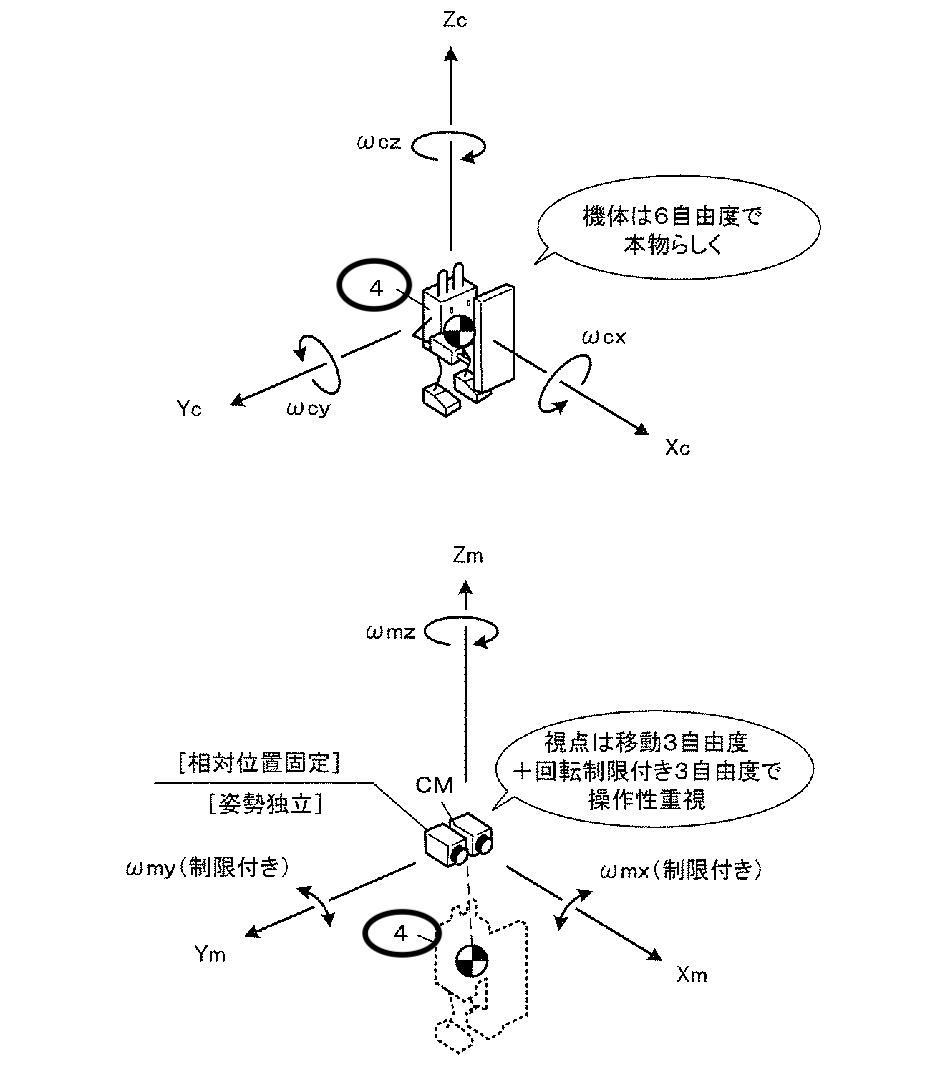
【図4】操縦性向上技術の原理の説明図
本実施形態では、プレイヤー操作キャラクター4には6つの自由度が与えられる。すなわち、プレイヤー操作キャラクター4の前後・左右・上下の座標系X、Y、Zは、ゲーム空間座標系に対して移動自在であり、各軸周りの回転も自在である。結果、プレイヤー操作キャラクター4は、仮想3次元空間内で任意の方向に移動し、任意の姿勢を取り得る。
これに対して、仮想カメラの座標系Xm、Ym、Zmの回転については制限がかかる。結果として、ゲーム画面では、プレイヤー操作キャラクター4の移動や姿勢変化に応じて、ピッチングやローリングによる視界変化と、前後の振り向きに相当する視界変化はあるが、上下の反転は起きないことになる。その点でプレイヤー操作キャラクター4のコントロールがし易くなる。
■実施例
これに対して、仮想カメラの座標系Xm、Ym、Zmの回転については制限がかかる。結果として、ゲーム画面では、プレイヤー操作キャラクター4の移動や姿勢変化に応じて、ピッチングやローリングによる視界変化と、前後の振り向きに相当する視界変化はあるが、上下の反転は起きないことになる。その点でプレイヤー操作キャラクター4のコントロールがし易くなる。

【図4】ゲームシステム1000の動作の流れ
ゲームシステム1000は、先ず、受け付け処理を実行する(ステップS12)。
受け付け処理は、例えば、使用するゲームステージの選択を受け付ける。また、プレイヤー別に、使用するプレイヤー操作キャラクターの選択、使用するVRゴーグル1200 の選択、使用する座席1010の選択、などを受け付ける。勿論、これら以外の内容の選択・入力の受け付けも適宜行うことができる。例えば、プレイ対価の徴収や、プレイヤー別のセーブデータの読み込みなどを行うことができる。
次に、ゲームシステム1000は、各種初期化を行う(ステップS14)。具体的には、VRゴーグル1200のキャリブレーション、ゲーム空間6の初期化、基準面8の設定、各プレイヤー操作キャラクター4の初期配置などを行う。
次に、ゲームシステム1000は、ゲーム進行制御を開始する。つまり、ゲームプレイを開始する(ステップS16)。
ゲームプレイが開始された後、チームリーダーによる基準面可視化操作が検出される(ステップS70のYES)と、ゲームシステム1000は、当該チームリーダー及び当該チームリーダーと同じチームの全プレイヤーのゲーム画面にて基準面8が可視化/表示される(ステップS72)。そして、当該チームリーダーと同じチームの全プレイヤーを対象にして、不利に作用するハンディキャップを適用する処理を実行する(ステップS74)。
ゲームプレイが終了する(ステップS80のYES)と、ゲームシステム1000は、プレイ結果の通知を行って(ステップS82)、プレイヤー別のセーブデータの更新を行い(ステップS84)、一連の処理を終了する。
■展望、結語
以上、本発明によれば、ゲーム空間の設定を、宇宙空間或いは宇宙相当空間とした場合に生まれる問題(キャラクターの過度な分散によるゲーム進行の阻害、キャラクターの移動や姿勢のコントロールが困難)が低減する技術を提供することができる。
■概要
出願国:日本 発明の名称:プログラム及びコンピュータシステム
出願番号:特願2017-209751
特許番号:特開2019-080743
出願日:2017年10月30日
公開日:2019年5月30日
出願人:株式会社バンダイナムコエンターテインメント
経過情報:出願審査未請求
その他情報:本特許の出願国は日本のみである
IPC:A63F 13/57
<免責事由>
本解説は、主に発明の紹介を主たる目的とするもので、特許権の権利範囲(技術的範囲の解釈)に関する見解及び発明の要旨認定に関する見解を示すものではありません。自社製品がこれらの技術的範囲に属するか否かについては、当社は一切の責任を負いません。技術的範囲の解釈に関する見解及び発明の要旨認定に関する見解については、特許(知的財産)の専門家であるお近くの弁理士にご相談ください。