人より綺麗に掃除

なぜ正確?お掃除ロボットの謎
現広く普及している床領域を掃除する全自動お掃除ロボットに関する特許発明を紹介します。
この特許発明は、ロボットが普及し始める以前(2001年)にイギリスにて出願さ れ、国際出願を経て日本に出願されたものです。
この特許発明が出願される以前は、ロボットが移動するマップを構築するための情報収集 の際に誤差が蓄積してしまい、正確なマップを作成できないという課題がありました。 これに対して、この特許発明では、ロボットが移動してマップ内の前のポジションに戻る 際に、現在のポジションと前のポジションとが同一になるようにマップを修正することで 、誤差の蓄積を抑えて正確なマップを作成可能にしています。
このように、この特許発明は、現在広く普及している全自動お掃除ロボットの進化過程を 体感できる内容です。
■発明のポイント
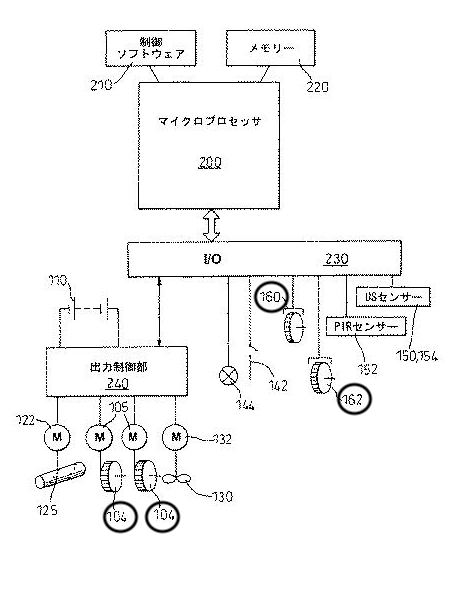
本発明の自律マシンの具体例であるロボット真空掃除機100は、図1及び図2に示すよ うに、トラクションモーターによって前進方向あるいは後退方向に駆動できる駆動ホイー ル104を備えており、トラクションモーターのそれぞれを独立的に制御することで全区 域移動が可能になっています。また、掃除機100には、障害物の存在などの情報を得る ための複数のセンサー、オドメトリー情報を得るためのオドメトリーホイール、及び、こ れらの情報から作業領域のマップを作成してマップに基づいて掃除作業を行わせるための ナビゲーションシステムが設けられています。
図6
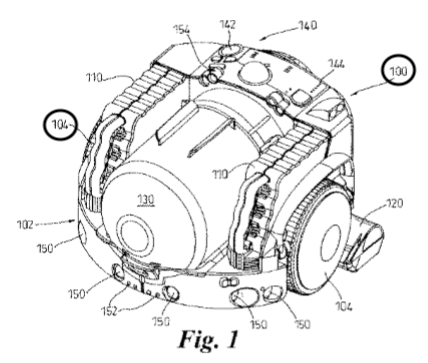
図7
掃除機100が最初にスタートする際、掃除機100は自身が配置される領域の知識を持 っていません。このため、掃除機100はまず、作業する領域の知識を獲得するために、 この領域をスキャニングします。例えば、図4及び図5に示すように、掃除機100をポ イントAからスタートしてスキャニングを行います。掃除機100は、部屋の境界回りで 航行を行い、連続的に壁405や障害物420~426の存在を検知して、自身が壁や障 害物から所定の距離だけ離れた状態を維持します。掃除機100は、自身が部屋の境界を たどる間に獲得した経路に関する情報を連続的に記録します。掃除機100は、オドメト リーホイールセンサー160、162から移動距離および移動方向に関する情報を取り出 します。このとき、ナビゲーションシステムは、規定距離間隔で、掃除機100の方向に おける角度変化(前のサンプルにおける方向との比較で)のサンプリングを行い、さらに 作業領域のマップを構築するため掃除機100がたどる経路を詳細にプロットします。
図4
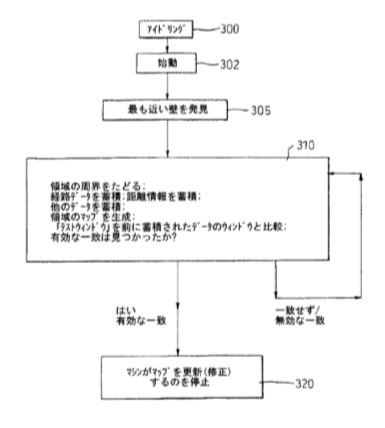
図5
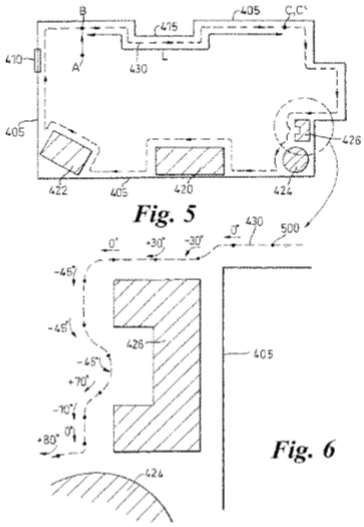
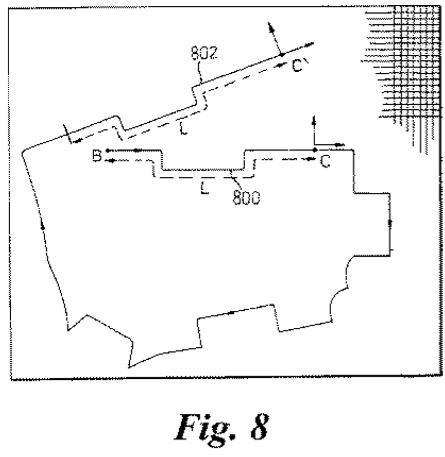
図8には図4に示す部屋のマップの実例を示しています。境界周囲の掃除機100の経路 の各ポイントは、このマップ上の座標によって規定されます。そして、掃除機100は、 境界に沿って以前訪れたポジションに戻ってきたかどうかを確証します。具体的には、角 度経路データの直近のLメートル値と経路データの以前のLメートルブロックを比較しま す。その後、現在のポジションと前のポジションとが同一になるようにマップを修正しま す。これにより、誤差の蓄積を抑えて正確なマップを作成可能にしています。その後、掃 除機100は、誤差の蓄積が抑えられた正確なマップを利用して、作業領域の掃除作業を開始することができます。
図8
■概要
発明の名称:自律マシン
出願番号:特願2003-542414号
特許番号:特許第4249624号
登録日:平成21年1月23日(2009.1.23)
出願人:ダイソン・テクノロジー・リミテッド
経過情報:2009年1月23日に特許登録がなされましたが、現在は年金不納により登録抹消されています。
<免責事由>
本解説は、主に発明の紹介を主たる目的とするもので、特許権の権利範囲(技術的範囲の解釈)に関する見解及び発明の要旨認定に関する見解を示すものではありません。自社製品がこれらの技術的範囲に属するか否かについては、当社は一切の責任を負いません。技術的範囲の解釈に関する見解及び発明の要旨認定に関する見解については、特許(知的財産)の専門家であるお近くの弁理士にご相談ください。