皆さんの机の上にデスクライトって置かれていますか? 勉強机やPCデスクにデスクライトを起き、書類を読むことは一般的に広く行われています。
このデスクライト、非常にポピュラーな製品ですが、バルミューダが手掛けるデスクライトは一味違います。従来のデスクライトとは比べ物にならない、超ハイテクが搭載されているのです。
今回紹介する発明は、使用者の目と対象物との距離を常に適切に保つと共に、適切な照度で机上を照らすことができるデスクライトです(特許第6723931号、出願日:2016年1月20日)。
「常に適切に保つ」と言われても、どういうこと? って理解に苦しむかもしれません。普通、デスクライトというのは机に設置したら、明るさを適切に調節して、そして読書や作業が一番具合良くできる位置に、ライトを当てるようにしますよね。でも、使用者の姿勢が様々に、時々刻々と変化するのに対して、ライトの照明位置は最初の設定箇所から動きませんね。だから、姿勢が変わったらまたライトの位置を調整しないといけないわけです。
「そんなのあたりまえでしょ!」と思うかもしれませんが、そこが発明の母。本発明のデスクライトは、使用者の目の位置を常に把握し、その位置データに基づいて、机上の照度を最適にするようにアームを動作させて光源を移動させることとしたのです。
普段あたりまえに感じている不便を見逃さない姿勢がよく現れた特許だといえますね。
発明の背景
一般的な照明装置として、いわゆるデスクライトなどが知られています。このような照明装置は、使用者自身によって適宜動かされて位置調整され、意図したように適切な照度となるように、使用されます。
このようなデスクライトとしては、様々に改良されたものがあります。例えば、照明方向を変化させるための可動部分にモータを設けた照明装置が知られています。また、加齢や疲労で目のピント調整機能が低下する場合に対応して、色を調整したり、照射範囲を制御したりする照明装置が知られています。また、文字サイズや、カラー/モノクロを判定して、光を調整する照明装置が知られています。
しかし、上述したような一般的な照明装置には、次のような問題があります。詳しくは、使用者の姿勢が時間の経過とともにいろいろと変化することが考慮されていません。姿勢が変化すると、視線、机、光源の互いの位置関係が変化します。例えば、使用者が書籍を読むときに、机の上の書籍と、目と間の距離が短い状態がしばらく続く場合があります。すると、眼球の毛様体筋が緊張し、視力低下の原因となります。
また、机上で明るく照らされる部分と、そうでない部分との照度差が大きくなると、目に負担がかかり、同様に視力低下の原因となります。さらに、筆記具や使用者の手の影によって書籍の紙面が暗くなると、文字等を読むことが困難となり、同様に視力低下につながります。
また、机上の照度が低いと、目を近づけて本などを読もうとするため、前述したように目と対象物との距離が短くなり、視力低下の原因となります。
そこで、使用者の目と、見る対象物との距離を適切に保つことができ、しかも、適切な照度で机上を照らすことができる照明装置が要望されています。
どんな発明?
本発明の照明装置によって、使用者の目と、見る対象物との距離を適切に保つと共に、適切な照度で机上を照らすことができます。
このような照明装置の発明の具体例について、以下に説明します。
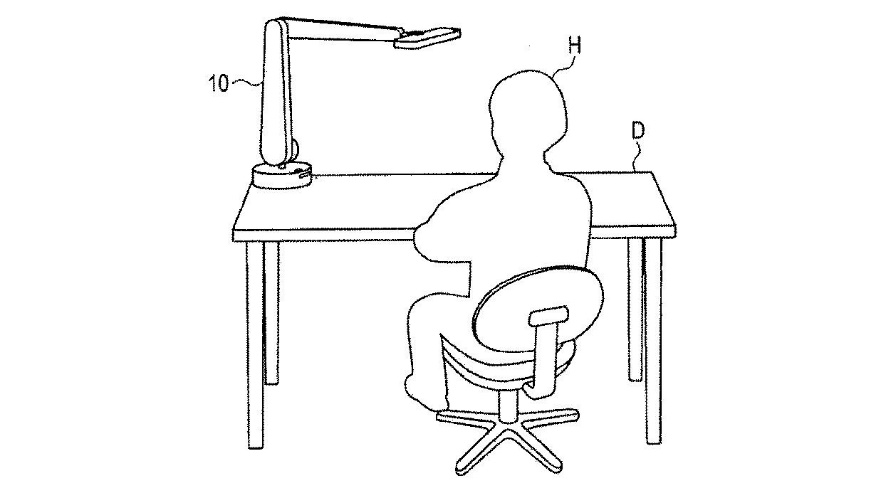
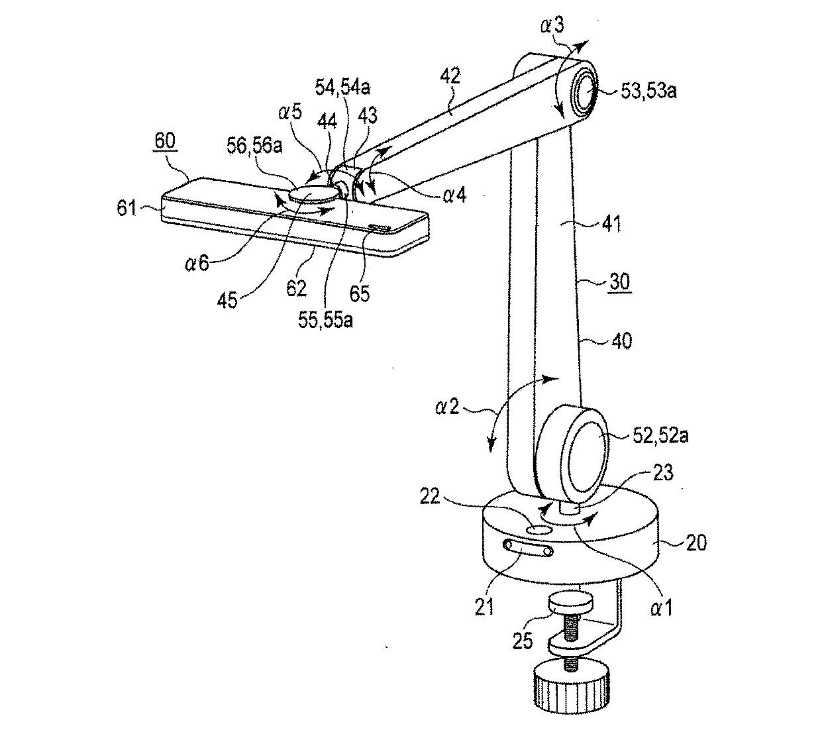
図1は本発明の照明装置10の一例、および、照明装置10が設置された机Dを示す斜視図です。なお、図1中Hは使用者を示しています。図2は照明装置10を示す斜視図です。
 【図1】
【図1】
 【図2】
【図2】
図1および図2に示すように、照明装置10は、机D上に載置されるベース部20を備えます。また、このベース部20を机Dに固定するための固定用クランプ25を備えます。また、ベース部20に下端部が取り付けられつつ動くことで光源62の位置を決めるアーム機構30を備えます。また、このアーム機構30の先端部に取り付けられたヘッド部60を備えます。
ベース部20の内部には、後述する制御装置100があります。ベース部20の手前側には、使用者Hの特定部位(例えば、目の位置)と、使用者Hの上半身の姿勢を検出して、フェイス画像(ユーザ画像)を出力するフェイスカメラ(ユーザカメラ)21があります。また、ベース部20の上面にはモードスイッチ22があります。
アーム機構30は、アーム部40と、このアーム部40を動作させるアーム動作部50とを備えています。
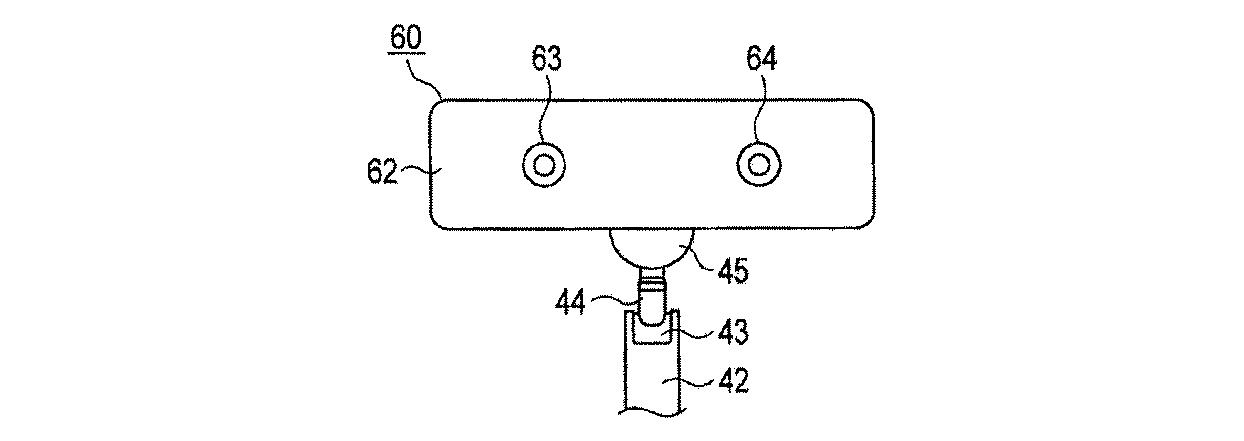
アーム部40は、ベース部20に内蔵された回転軸23に設けられています。アーム部40は、図中矢印α1方向(横方向)に回動する第1アーム41を有します。また、第1アーム41の上部を中心にして上下に回動できる第2アーム42を有します。また、第2アーム42の手前側部分を中心にして回動できる仰角調整部材43を有します。また、この仰角調整部材43に取り付けられた回動可能な首振り部材44を有します。また、この首振り部材44に取り付けられた回動可能なヘッド取付部45を有します。ヘッド取付部45にはヘッド部60(光源あり)が取り付けられています。
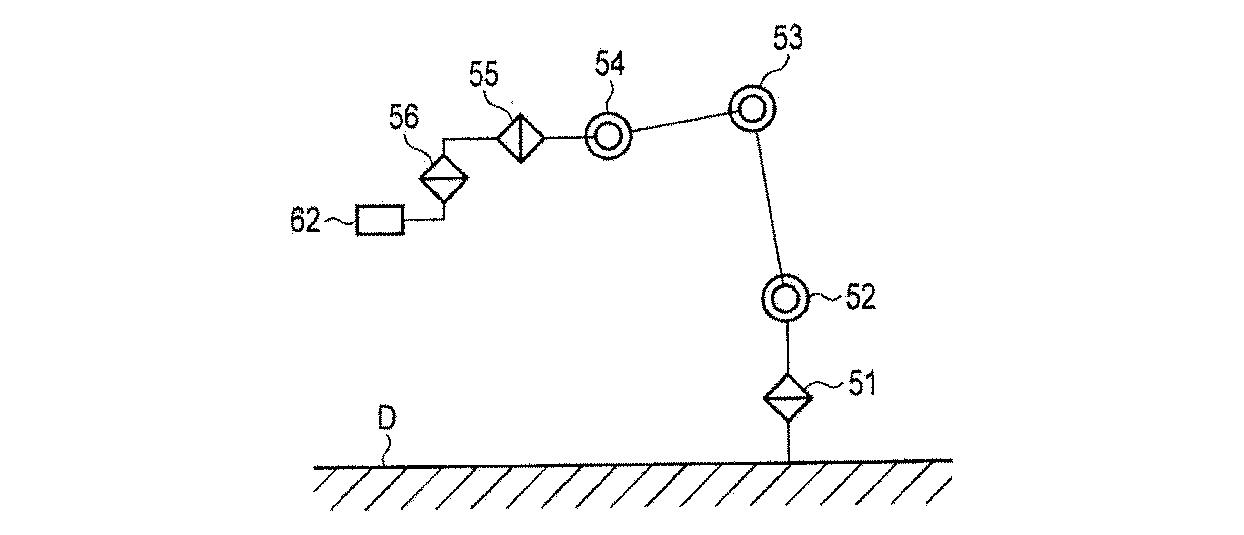
アーム動作部50は、ベース部20に内蔵されています。アーム動作部50は、回転軸23を図中矢印α1方向(首振り方向)に回動させる第1モータ51及び第1角度センサ51aを有します。また、第1アーム41を図中矢印α2方向(前後に倒す方向)に回動させる第2モータ52及び第2角度センサ52aを有します。また、第2アーム42を図中矢印α3方向(縦方向)に回動させる第3モータ53及び第3角度センサ53aを有します。また、仰角調整部材46を図中矢印α4方向(縦方向)に回動させる第4モータ54及び第4角度センサ54aを有します。また、首振り部材44を図中矢印α5方向(前方から見たときに回転する方向)に回動させる第5モータ55及び第5角度センサ55aを有します。また、ヘッド取付部45を図中矢印α6方向(上から見たときに回転する方向)に回動させる第6モータ56及び第6角度センサ56aを有します。なお、アーム部40の機構モデルを模式的に示す図5でも概要を把握できます。
 【図5】
【図5】
アーム機構30は、アーム動作部50を動作させることで、後述する光源62の位置及び照射方向をさまざまに制御して、例えば、最適な位置に光源を移動させることが可能です。
図3は照明装置10に組み込まれたヘッド部60を示します。
 【図3】
【図3】
ヘッド部60は、長方形状のヘッドベース61を有します(図2参照)。また、ヘッド部60は、図3に示すように、このヘッドベース61の下面に配置されて、机D上を照らす光源62を有します。また、光源62と同じ方向を向き、机上の照度分布を検出し、デスク画像を出力するデスクカメラ63,64を有します。また、ヘッドベース61の上面(光源とは反対側)に配置されて、室内の環境状況を検出する照度センサ65(図2参照)を有します。
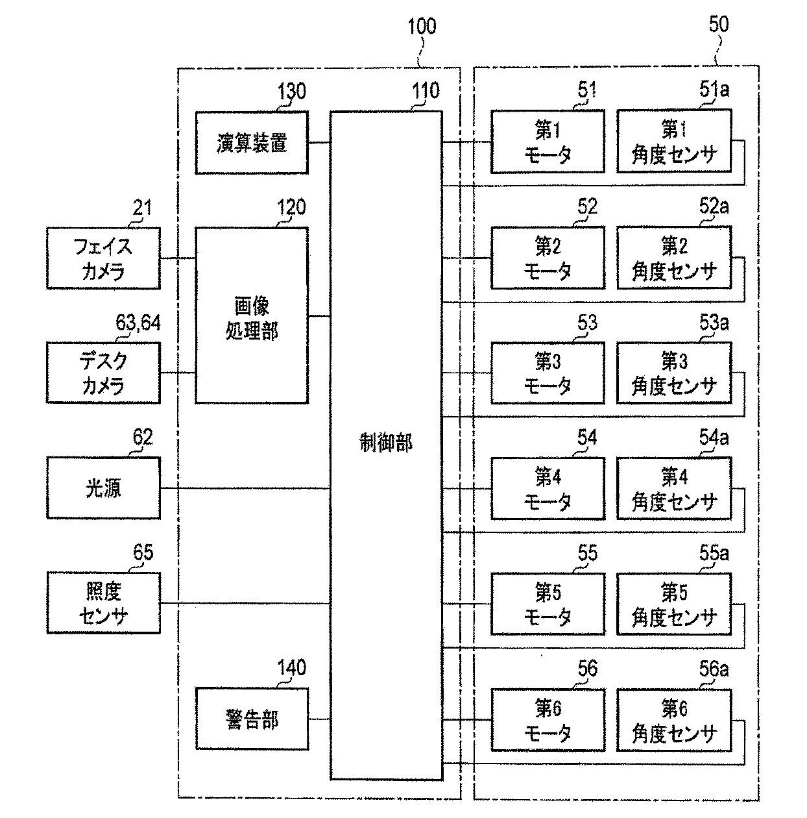
照明装置10の概要を表す図4のブロック図に示すように、制御装置100は、各部を連携して制御し、かつアーム部30を制御する制御部110を有します。また、この制御部110に接続された画像処理部120、演算装置(演算部)130を有します。また、目と机との距離が所定距離(閾値)以下の場合に音又は光によって使用者Hに警告を発する警告部140を有します。
 【図4】
【図4】
画像処理部120には、フェイスカメラ21の出力、デスクカメラ63,64の出力が接続されています。画像処理部120では、フェイスカメラ21で得られたフェイス画像と、デスクカメラ63,64で得られたデスク画像とを処理します。そして、使用者Hの目の位置データを検出し、使用者Hの目と机Dまでの距離Q及び使用者Hの姿勢を算出します。
演算装置130は、使用者Hの上半身の姿勢に基づいて、光源62の最適光源位置を算出します。具体的には、使用者Hの影を最小限にし、かつ、机D上の照度差を最小限にするように、光源62の最適光源位置を算出します。
警告部140は、使用者Hの目と机Dとの距離Qが基準値(所定値)を下回ったときに音や光によって警告する機能を有します。具体的には、スピーカからの警告音を発したり、光源62を点滅させたりします。
このように構成された照明装置10は、次のようにして使用します。照明装置10には、例えば次の4種類のモードが準備されています。すなわち、(M1)待機モード、(M2)キャリブレーションモード、(M3)光源位置制御モード、(M4)手元集中モードです。これらのモードは、モードスイッチ22の押下げによって順次切り替わります。
(M1)待機モード
待機モードは、照明装置10のスタンバイ処理を行うモードです。電源投入後に待機モードへ遷移します。待機モードでは、アーム機構30の動作や光源62の点灯は行いません。
(M2)キャリブレーションモード
キャリブレーションモードは、フェイスカメラ21及びデスクカメラ63,64の調整(較正)を行うためのモードです。通常、初回の電源投入時に一度だけキャリブレーションモードに遷移しますが、操作次第でキャリブレーションモードに入ることができます。
(M3)光源位置制御モード
光源位置制御モードでは、照明装置10の光源62の位置が使用者Hの姿勢や環境状況に応じて制御されます。使用者Hのモードスイッチの操作によって、選択的に光源位置制御モードへ移行します。制御の方法については後述します。
(M4)手元集中モード
手元集中モードは、照明装置10の光が常に使用者Hの手元に当たるように制御されるモードです。モードスイッチ22の操作によって、手元集中モードを選ぶことができます。手元集中モードのときに、照明装置10はデスクカメラ63,64によって使用者Hの手の位置を認識しています。照明装置10は、デスクカメラ63,64から得られる画像の中央に使用者Hの手が移るようにアーム機構30を制御します。これにより、使用者Hの手の周辺が照らされるようになります。
電源が投入された後、モードスイッチ22を押すごとに上記の4つの動作モード(M1)~(M4)を順に選択します。そして、選択した動作モード(M1)~(M4)を実行し、電源を切ることにより終了します。
詳述しますと、モードスイッチ22は押下げのたびに動作モード(M1)~(M4)が切り替わります。具体的には、開始後に、モードスイッチ22が押下げられないと、待機モード(M1)が継続されます。押下げされると、キャリブレーションが完了されているか否かが判断され、完了していれば光源位置制御モード(M3)に進みます。
キャリブレーションが完了していなければ、キャリブレーションモード(M2)が実行され、キャリブレーションが正常に実行されているか否かが判断されます。キャリブレーションが正常に完了されていれば光源位置制御モード(M3)に進みます。一方、完了していなければ、キャリブレーションモード(M2)に戻ります。
光源位置制御モード(M3)が始まると、モードスイッチ22が押下げられるまで光源位置制御モード(M3)が継続します。押下げられた場合は、手元集中モード(M4)に進みます。
モードスイッチ22が次に押下げられるまで、手元集中モード(M4)が継続します。押下げられた場合は、すべて終了します。
ここで、光源位置制御モード(M3)について説明します。光源位置制御モード(M3)に移行すると、フェイスカメラ21によって、使用者Hの画像を取得します。照明装置10の画像処理部120は、ソフトウェアによる画像判別機能を有します。あらかじめ入力された多数の人間の姿勢、手の形等のデータも参考にして、ソフトウェアによって画像判別が行われます。取得した画像を画像処理部120に適用することで、画像上の目の位置を求めます。
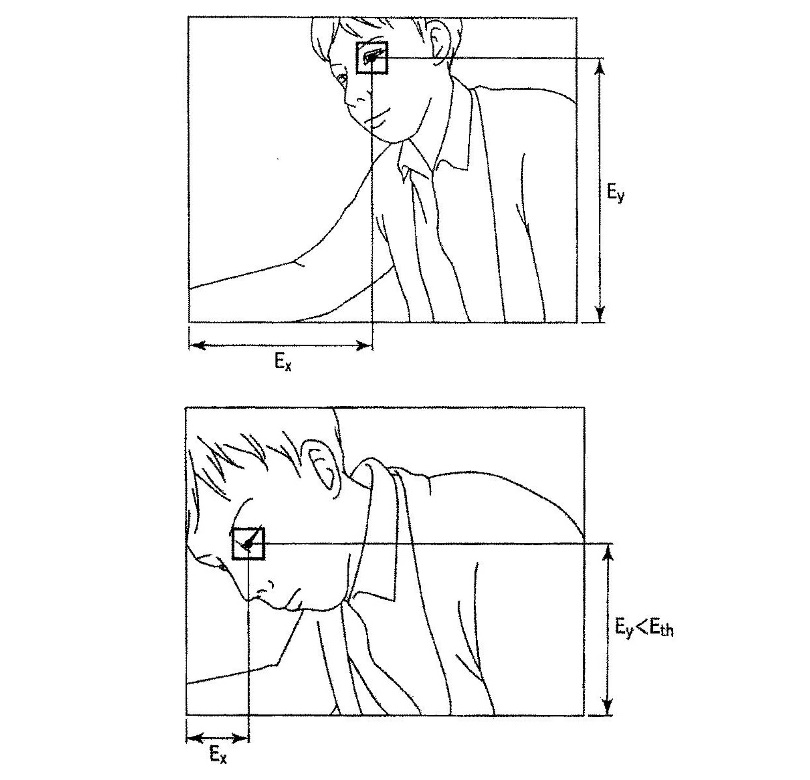
目の位置座標をEx,Eyとします(図8もご参照)。Eyは、上下方向を示し、机Dの上面部からの高さを表す指標になります。よって、目の位置の高さが、机Dから目までの距離となります。あらかじめ決めておいた所定の値(姿勢悪化警告閾値といいます)よりもEyの値が小さくなったときに、目の位置が低くなったと認識して、姿勢が悪化したと判断します。
使用者Hの姿勢が悪化したと演算装置130で検知されると、照明装置10は使用者Hに対して警告部140によって音や光等で警告します。
図8及び図9は、照明装置10の目と机との距離の検出動作を示します。
 【図8】(上)及び【図9】(下)
【図8】(上)及び【図9】(下)
図8及び図9は、フェイスカメラ21が使用者Hの目の位置座標を認識しているときのEx,Eyの関係を示します。目の位置座標は、(Ex,Ey)で表されます。例えば、姿勢悪化警告閾値Ethを300とします。図8に示すように、使用者Hの姿勢が正常のときに、画像処理によって目の位置座標が(Ex,Ey)=(310,400)であったとします。この場合、目と机との距離Eyが400であるため、姿勢悪化警告閾値Ethよりも大きいので警告を出しません。
一方、図9に示すように、使用者Hの姿勢が悪化しているときに、画像処理によって目の位置座標が(Ex,Ey)=(90,260)になったとすれば、目と机の距離Eyは260となるため、姿勢悪化警告閾値Ethよりも小さいので警告を出します。
本発明の照明装置10は、照明センサ65によって観測した現在の照明状況に基づいて、照度ムラが少なくなるように、照明装置10の各部分を移動させて光源の位置を制御する機構を有します。このような機構により、光源62の位置を最適位置に移動します。
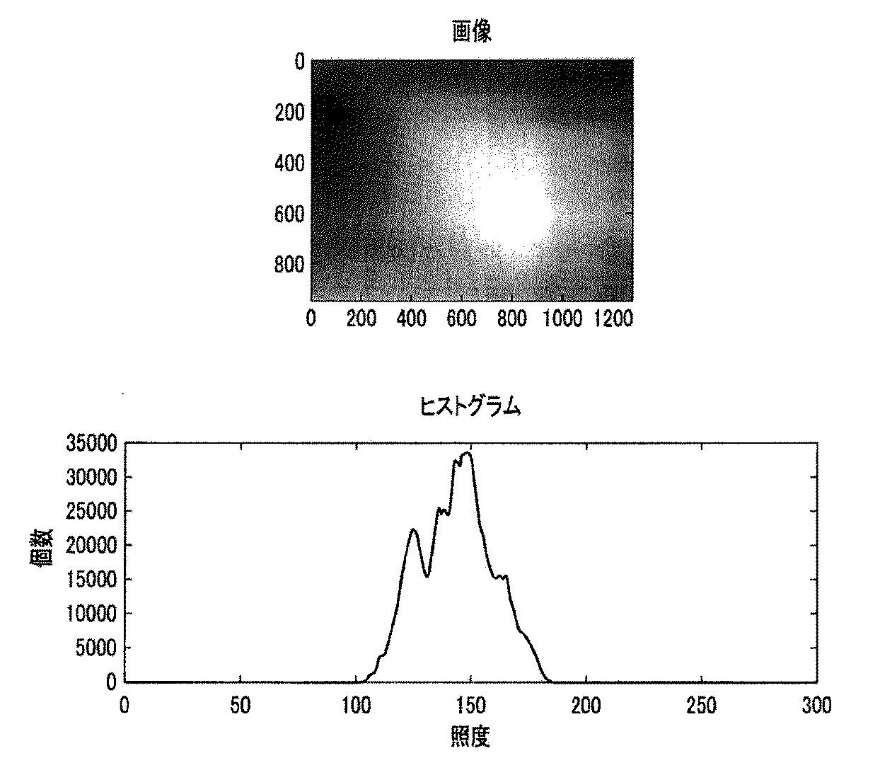
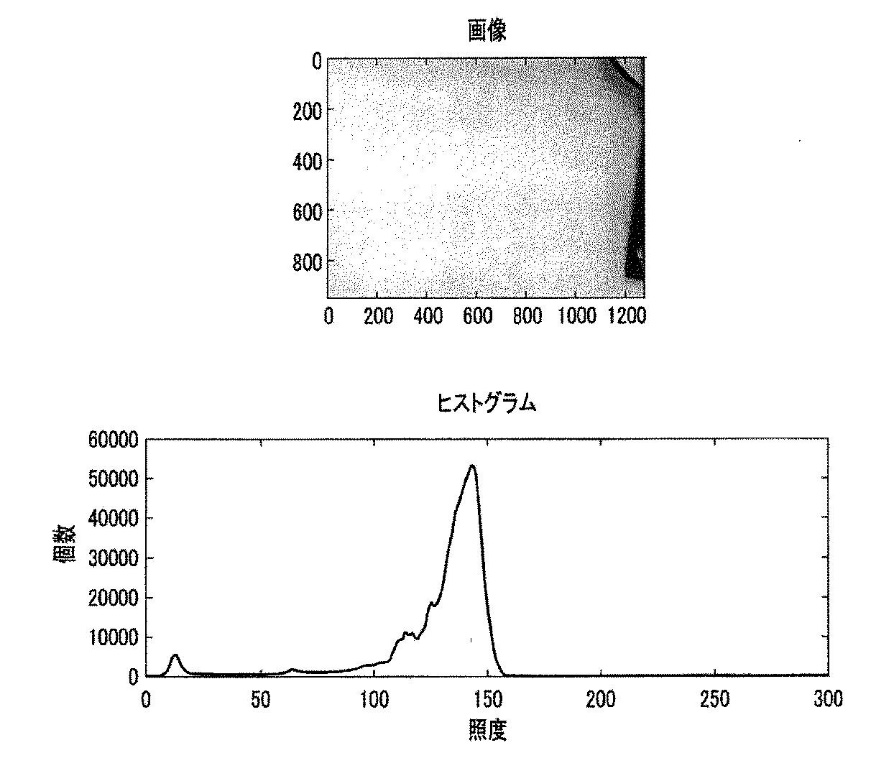
実験によって実証された結果を次に示します。図12及び図13は、実際に得られた照度分布の改善過程を示す画像、および、この画像を画像処理して得られた照度分布のヒストグラムです。改善前(光源が移動する前)が図12で、改善後(光源が最適位置に移動した後)が図13です。
 【図12】
【図12】
 【図13】
【図13】
詳しく説明しますと、改善前では、デスクカメラ63,64により得られた画像から、図12のような照度分布のヒストグラムを得ました。ヒストグラムの分散が大きく、照度のムラがある状況です。
一方、本発明の照明装置10によって、アーム機構30を動作させて、光源62を適切な位置に移動させました。移動によって改善した後の照度分布のヒストグラムは、図13です。中央部が最も明るく、周辺に行くにつれ次第に暗くなる理想的な照度分布となります。
なお、本発明は上述したような形態に限定されません。フェイスカメラで撮像する特定部位として、目以外の上半身の部位、例えば、耳の位置を採用できます。間接的に目の位置を予測できる部位であれば、特定部位は目に限られません。
ここがポイント!
上記の通り、本発明の照明装置は、使用者Hの目と机Dとの距離が所定値以下になった場合に警告を発し、使用者Hの目と机Dとの距離が近づき過ぎないように保つことができます。また、机D上の照度分布が不適な場合に、照度分布を改善し、適切な照度で机上を照らすことができるように光源を移動させることができます。このため、使用者Hの視力低下を防止することができます。
例えば日本国で特許となった本発明のポイントを解説しますと、本発明の照明装置の特徴は、使用者の姿勢に応じて光源の位置を変えることで机上を適切に照らす機構を備える点です。
詳しくは、本発明の照明装置は、机上を照らすための光源を備えます。また、光源の位置を移動させるアーム機構を備えます。また、机上の照度分布を検出する照度分布検出手段(図13で示した機構など)を備えます。また、使用者の特定部位の位置データを検出する位置データ検出手段(図8および図9で示した機構など)を備えます。
そして、本発明の照明装置は、照度分布検出手段が検出した机上の照度分布および位置データ検出手段が検出した位置データに基づいて、机上の照度ムラが少なくなる光源位置を算出する演算部を備えます。
さらに、演算部が算出した光源位置に光源が移動するようにアーム機構を動作させるアーム制御部を備えています。つまり、この照明装置は光源を自動的に移動させることにより、異なった使用者の姿勢に対応でき、ひいては、机上を適切に照らすことができます。
何に活用されているの?
本特許は、「バルミューダ株式会社」から出願されたものです。「バルミューダ株式会社」は、ご存じのように今までにない新しいタイプのトースターや扇風機を販売してきた会社です。この会社のウェブサイトには、他にも掃除機やスピーカー、ライトなどの商品も掲載されています。
従来からある照明装置の仕組みを革新的に進歩させたアイデアが、本特許発明に取り入れられています。
本特許の発明は、現在販売されている照明装置に直接的には利用されていないかもしれません。しかし、本特許の発明は、今までにないユニークなアイデアとして照明装置に適用できると予想されます。今後、光源を自動的に移動してくれる照明装置が販売されるかもしれません。
特許の概要
|
発明の名称 |
照明装置 |
|
出願番号 |
PCT/JP2016/051557(国際出願) |
|
公開番号 |
WO2016/117593(国際公開) |
|
特許番号 |
特許第6723931号 |
|
出願日 |
2016.01.20 (平成28年1月20日) |
|
公開日 |
2016.07.28 (平成28年7月28日) |
|
登録日 |
2020.06.26 (令和2年6月26日) |
|
審査請求日 |
2019.01.18 (平成31年1月18日) |
|
出願人 |
バルミューダ株式会社 |
|
発明者 |
佐藤 智紀 |
|
国際特許分類 |
H05B 37/02 |
|
経過情報 |
本願は、PCT国際出願されたあと、日本を含め合計10か国へ移行されています。日本国では、審査において1回の拒絶理由通知を経て特許となりました。 |
<免責事由>
本解説は、主に発明の紹介を主たる目的とするもので、特許権の権利範囲(技術的範囲の解釈)に関する見解及び発明の要旨認定に関する見解を示すものではありません。自社製品がこれらの技術的範囲に属するか否かについては、当社は一切の責任を負いません。技術的範囲の解釈に関する見解及び発明の要旨認定に関する見解については、特許(知的財産)の専門家であるお近くの弁理士にご相談ください。