安全と信頼を実現するテレオペレーションシステム

自動運転技術は、運輸業界における最も刺激的な進化の一つとして広く認識されています。しかし、この技術が普及するにつれ、自動運転車両が直面する課題や状況の複雑さも明らかになってきました。特に、予期せぬ障害物の出現や通信の中断など、自動運転システムだけでは対応が難しい状況が存在します。
このような課題に対処するために、本発明ではテレオペレーションシステムが提案されています。このシステムは、遠隔地からの人間の介入を可能にし、自動運転車両が直面する様々な状況に柔軟かつ迅速に対応できるように設計されています。今回紹介する特許が、自動運転車両の安全性、信頼性、および運用効率の向上にどのように貢献するかを紹介していきます。
発明の背景
従来の自動運転車両の開発に関するさまざまなアプローチは、主に消費者が購入するための自動運転車両を生産することを目的として、従来の車両(例えば、手動で運転される自動車車両)を自動化することに重点を置いています。
一方、多くの自動車会社とその関連企業は、ドライバーなしで運用できる車両を所有できるように、従来の自動車および制御メカニズム(例えば、ステアリングなど)を変更しています。
従来の自動運転車両は、特定の条件下で安全に重要な運転機能を実行しますが、車両コントローラーが乗員の安全を危険にさらす可能性のある特定の問題を解決できない場合、ドライバーが制御(例えば、ステアリングなど)を引き継ぐ必要があります。
このような前提に基づくと、自動運転車の大多数は、特定の席または場所が車両内に必ず用意されて、そこに免許を持つドライバーを収容するように設計されるべきであるという固定観念が生まれます。
このことから自動運転車両は最適な設計がされているとは必ずしも言えず、車両設計をさらに簡素化し、リソースを節約する機会(例えば、自動運転車両の製造コストを削減する)を逃しているといえます。
また、従来型の自動運転車両設計思想には他にも欠点があります。従来の考え方によれば、ライドシェアなどによって車両を共有している場合には、ドライバーは車両を特定の場所でピックアップおよび降車する必要があるため、便利な交通サービスを提供するのに適しているとはいえません。このような場所を都市環境で新たに用意することは現実問題として困難であり、共有車両を駐車するために比較的高価な不動産(つまり、駐車場)を準備する必要があります。
現在の交通サービスを提供するために使用される従来型車両は、ドライバーが離席するとそこから移動できなくなります。
このような背景から、ライドシェアアプローチは、交通サービスの需要に対して必ずしも適しているとは言えません。
どんな発明?
発明の目的
本発明は、上記事情に鑑みてなされたものであり、自動運転車両の軌道を遠隔操作で修正するシステムと方法を提案しています。背景技術と課題から導かれる主要な問題点は、自動運転車両が特定の状況や問題を自律的に解決できない場合があること、および従来の自動運転車両の設計が最適化されていないことにあります。これらの課題に対して、この発明では以下の技術的解決策を提案しています:
遠隔操作による軌道修正
自動運転車両が自律的に解決できない特定の問題や状況が生じた場合に、遠隔操作者が車両の軌道を修正できるシステムを提供します。このシステムは、遠隔操作メッセージを通じて自動運転車両からイベントに関連するデータを受信し、対応する行動方針を特定、ランク付け、およびシミュレートすることで、最適な解決策を選択し、それを自動運転車両に送信します。
複数のセンサーとデータの統合
自動運転車両は、環境を感知するために複数のセンサー(例えば、カメラ、レーダー、ライダー)を使用し、これらのセンサーからのデータを統合してリアルタイムで環境を認識します。このデータは、遠隔操作者が情報を視覚化し、軌道修正の決定を下すのに役立ちます。
遠隔操作者の介入による安全性の向上
特定の問題や状況を自動運転システムが解決できない場合に、人間の遠隔操作者が介入して軌道を修正することで、自動運転車両の安全性を向上させます。これにより、自動運転車両が直面する可能性のある限定的な状況や不確実性に柔軟に対応できます。
自律走行車両フリートの効率的な管理
自律走行車両フリートを効率的に管理し、遠隔操作を含む各種サービスを提供するためのプラットフォームを実装します。これにより、自動運転車両の運用とメンテナンスが容易になり、サービスの信頼性と利用可能性が向上します。
通信およびデータ処理の最適化
自動運転車両と遠隔操作プラットフォーム間の通信を最適化し、遠隔操作のためのデータを効率的に処理および伝送する方法を提供します。これには、イベントに関連する情報の視覚化、選択された行動方針の受信と送信が含まれます。
この特許発明により、自動運転車両の運用における安全性と効率性が向上し、自動運転技術の実用化と普及に貢献する技術的解決策が提供されます。
発明の詳細
上述のとおり、この発明は、遠隔操作によって自律走行車の軌道を修正するシステムと方法に関するものです。これは、さまざまな環境での自律走行車の安全かつ効率的なナビゲーションを保証する上での技術的背景と、それに関連する課題を対象としています。
遠隔操作による軌道修正
自律走行車両の運転中に発生する特定のイベントや状況に対処するために遠隔操作者が介入するプロセスを中心に展開される技術要素です。この技術には以下の個別技術要素が含まれています。
通信リンク: 自律走行無人車両と遠隔操作プラットフォーム(または遠隔操作者のコンピューティングデバイス)間の信頼性の高い通信リンクを介して、車両から遠隔操作メッセージが送信されます。このリンクは、車両の状態、環境データ、および特定のイベントに関連するデータを含むメッセージの伝送を可能にします。
イベントの検出とデータ分析: 遠隔操作センターは、自律走行無人車両から送信されたメッセージを受信し、その中のデータから車両が直面している特定のイベントを検出します。これには、障害物の存在、交通状況の変化、またはその他の安全に影響を与える可能性のある要因が含まれます。
行動方針の同定とランク付け: イベントに基づいて、一つ以上の行動方針が同定され、それぞれに対してランク付けが行われます。このプロセスには、シミュレーションを含む複数のステップがあり、遠隔操作者が情報をもとに最適な行動方針を選択できるようにします。
視覚化データの生成: イベントに関連する情報と提案された行動方針は、遠隔操作者のディスプレイに視覚化データとして提示されます。これには、行動方針のランクとシミュレーション結果が含まれます。
選択された行動方針の実行: 遠隔操作者が行動方針を選択すると、その選択は自律走行無人車両に送信され、車両は選択された行動方針に従って軌道を修正します。
遠隔操作サービスの実装: 自律走行無人車両が遠隔操作サービスを要求する場合、遠隔操作プラットフォームは適切な行動方針を実行するための指示を提供します。これには、障害物を回避するための軌道修正や、特定の地理的エリアを避けるための計画が含まれます。
これらの遠隔操作による軌道修正は、自律走行無人車両が直面する様々なイベントや状況に対して柔軟かつ効果的に対応できるようにすることを目的としています。
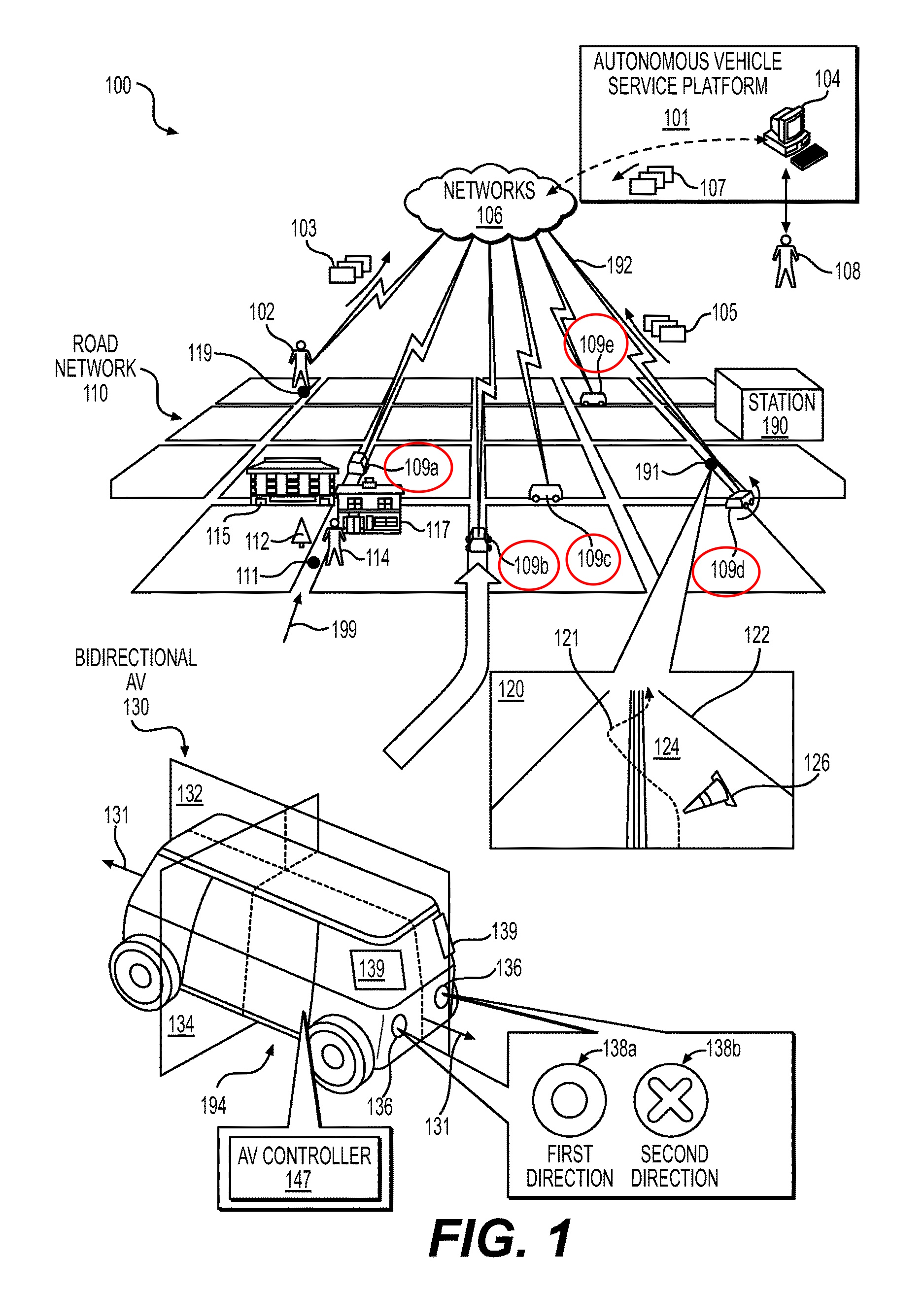
図1は、自動運転車サービスプラットフォームに通信ネットワークで接続された自動運転車両のフリートの実装を示す図です。サービスとして運用される自動運転車両のフリート109(例えば、自動運転車両109aから109e)が、道路ネットワーク110を自己運転し、自動運転車サービスプラットフォーム101との通信リンク192を確立する様子を示しています。
自動運転車両のフリート109がサービスを構成する例では、ユーザー102が一つまたは複数のネットワーク106を介して自動運転車サービスプラットフォーム101に自動運転輸送のリクエスト103を送信します。応答として、自動運転車サービスプラットフォーム101は、自動運転車両109のうちの一つを派遣して、ユーザー102を地理的位置119から地理的位置111まで自動的に輸送します。自動運転車サービスプラットフォーム101は、駅190から地理的位置119まで自動運転車を派遣するか、または既に乗客なしで輸送中の自動運転車109cを、ユーザー102の輸送リクエストに応じて転用することができます。自動運転車サービスプラットフォーム101は、乗客を伴って輸送中の自動運転車109cを、ユーザー102(例えば、乗客として)からのリクエストに応じて転用するようにさらに構成される場合があります。加えて、自動運転車サービスプラットフォーム101は、既存の乗客を降ろした後に、ユーザー102のリクエストに応じて転用するために、乗客を伴って輸送中の自動運転車109cを予約するように構成されてもよいでしょう。
複数のセンサーとデータの統合
自動運転車両におけるセンサーデータの統合は、正確なローカライゼーション、環境認識、およびナビゲーションの実現に不可欠です。
センサーには、画像キャプチャセンサー、オーディオキャプチャセンサー、レーダーデバイス、ソナーデバイス、およびLidarデバイスなどが含まれます。これらのセンサーは、自動運転車両のコントローラーに接続され、車両の周囲の環境を正確に理解するために使用されます。
センサーデータの統合プロセスには、異なるセンサーモダリティからのデータを融合して統合されたセンサーデータ値を形成することが含まれます。この統合プロセスは、センサーからのデータ(例えば、Lidarデータ、カメラデータ、レーダーデータなど)を融合させ、自動運転車両の位置を決定するために使用されます。例えば、自動運転車両が特定の方向に移動している場合、ローカライザーは地理的位置を特定し、センサーデータを使用して建物の表面などの参照データと比較して地理的位置を決定します。
この統合されたセンサーデータは、自動運転車両が自律的に運転するために必要な正確な環境認識とローカライゼーション情報を提供します。センサーデータの統合により、自動運転車両は、静的オブジェクトや動的オブジェクトを正確に検出、分類、および予測することができ、安全かつ効果的なナビゲーションと衝突回避を実現します。
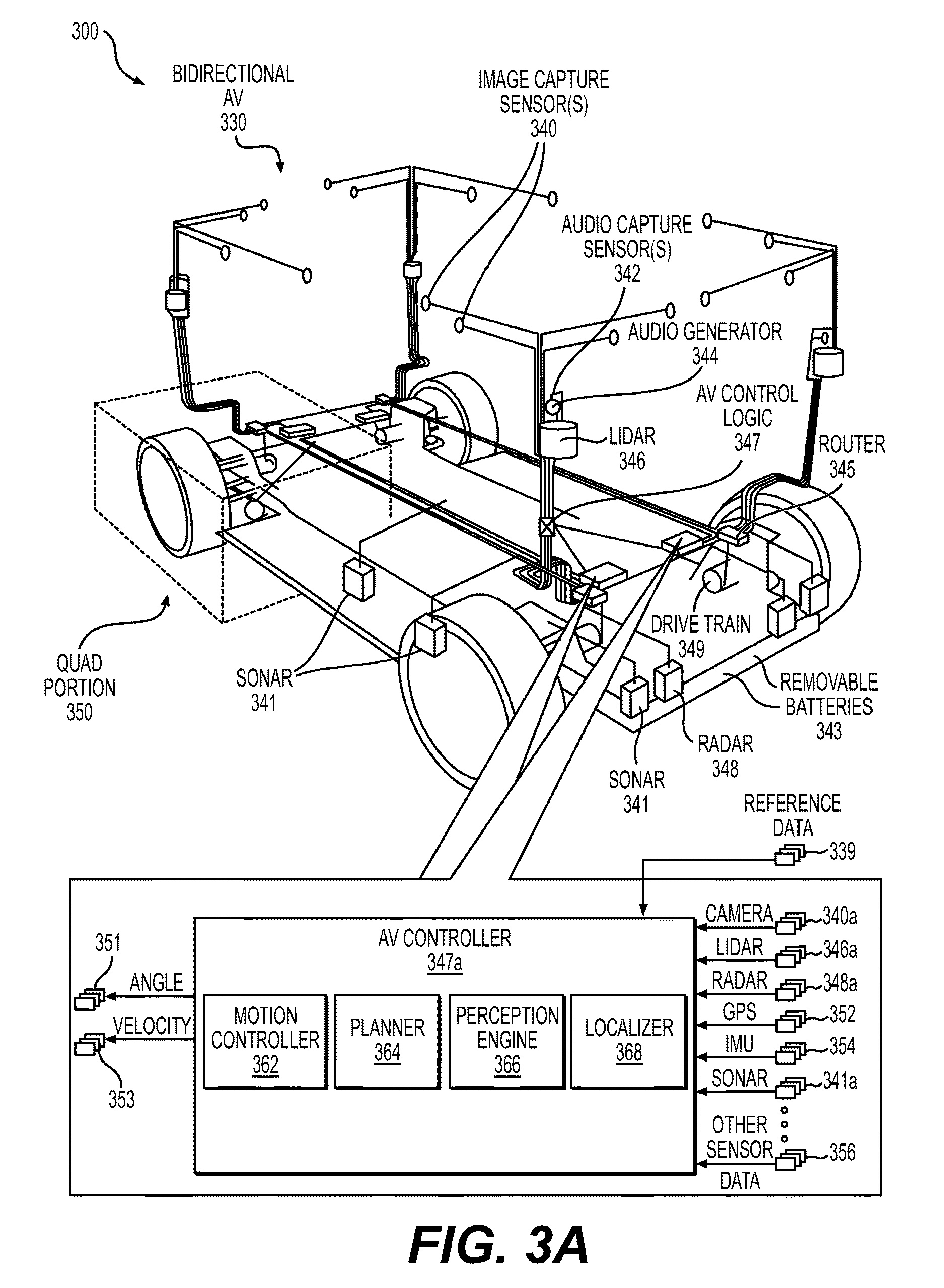
図3Aは、車両に実装されるセンサーなどのコンポーネントの例を示すものです。センサーには、画像キャプチャセンサー340(例えば、あらゆるタイプの光キャプチャデバイスやカメラ)、音声キャプチャセンサー342、レーダーデバイス348、ソナーデバイス341、およびLidarデバイス346などが含まれます(慣性計測ユニット、または”IMU”、グローバルポジショニングシステム(”GPS”)センサー、ソナーセンサーなど、表示されていない他のセンサータイプやモダリティもあります)。また、取り外し可能なバッテリー343は、交換が容易になるように構成されており、バッテリー343の充電が必要なためのダウンタイムを削減または無視できるようにしています。
多数搭載されているコントローラの中で、特に知覚エンジン366は、Lidarデータ346a、カメラデータ340a、レーダーデータ348aなど、1つ以上のソースからのセンサーデータおよびローカルポーズデータを受信するように構成されています。知覚エンジン366は、歩行者、自転車乗り、犬、他の車両などの外部オブジェクトを検出し、分類することができます。これらの外部オブジェクトの分類に基づいて、外部オブジェクトは動的オブジェクトまたは静的オブジェクトとしてラベル付けされます。
例えば、木として分類された外部オブジェクトは静的オブジェクトとしてラベル付けされ、歩行者として分類された外部オブジェクトは静的オブジェクトとしてラベル付けされます。静的とラベル付けされた外部オブジェクトは、マップデータに記述されているかもしれませんし、そうでないかもしれません。静的としてラベル付けされる可能性が高い外部オブジェクトの例には、交通コーン、道路を横断するセメントバリア、車線閉鎖標識、道路に隣接する新設の郵便受けやゴミ箱などがあります。動的としてラベル付けされる可能性が高い外部オブジェクトの例には、自転車、歩行者、動物、他の車両などがあります。外部オブジェクトが動的としてラベル付けされ、さらにその外部オブジェクトについてのデータが、分類タイプに関連する典型的な活動レベルと速度、および行動パターンを示す場合があります。外部オブジェクトに関するさらなるデータは、外部オブジェクトの追跡によって生成されることがあります。
したがって、分類タイプは、例えば、外部オブジェクトが計画された経路を走行する自動運転車の邪魔をする可能性があるかどうかを予測または判断するために使用されることがあります。例えば、歩行者として分類された外部オブジェクトは、最大速度および平均速度(例:追跡データに基づく)と関連付けられ、歩行者の速度と自動運転車の速度を比較して、衝突が起こりそうかどうかを判断することができます。
遠隔操作者の介入による安全性の向上
本発明で開示されるシステム、デバイス、および方法は、自律走行車両のナビゲーションに影響を与えるための軌道の修正(例えば、遠隔で)を開始するように構成されています。ドライバーレス車両の開発に対するさまざまなアプローチは、主に従来の車両を自動化することに重点を置いています。従来のドライバーレス車両は、一部の条件で安全な運転機能を実行しますが、車両コントローラが乗員の安全を危険にさらす可能性のある特定の問題を解決できない場合、ドライバーが制御を引き継ぐ必要があります。
遠隔操作システムは、自律走行車両が遠隔操作のリクエストを行う場合、自律走行車両サービスプラットフォームが遠隔操作サービスを提供するように構成されています。例えば、図1において、自律走行車両コントローラが、道路122のポイント191でパス124を遮るオブジェクト126を検出し、自律走行車両109dが比較的高い確実性で安全に通過できるパスまたは軌道を自律走行車両コントローラが確認できない場合、自律走行車両コントローラは遠隔操作サービスのリクエストメッセージ105を送信します。その応答として、遠隔操作コンピューティングデバイス104は、遠隔操作者108から障害物126を回避するための行動コースに関する指示を受け取ります。
これにより、自律走行車両は非定常的な運用状態から移行することができ、例えば、遠隔操作者によって指定された操作を実行することによって条件を解決するために案内された軌道を走行することができます。したがって、自律走行車両は運転中に発生する可能性のあるイベントや問題を解決する間、遅延する可能性がある自律走行車両の安全性を高めるために、遠隔操作サービスを呼び出すことができるのです。
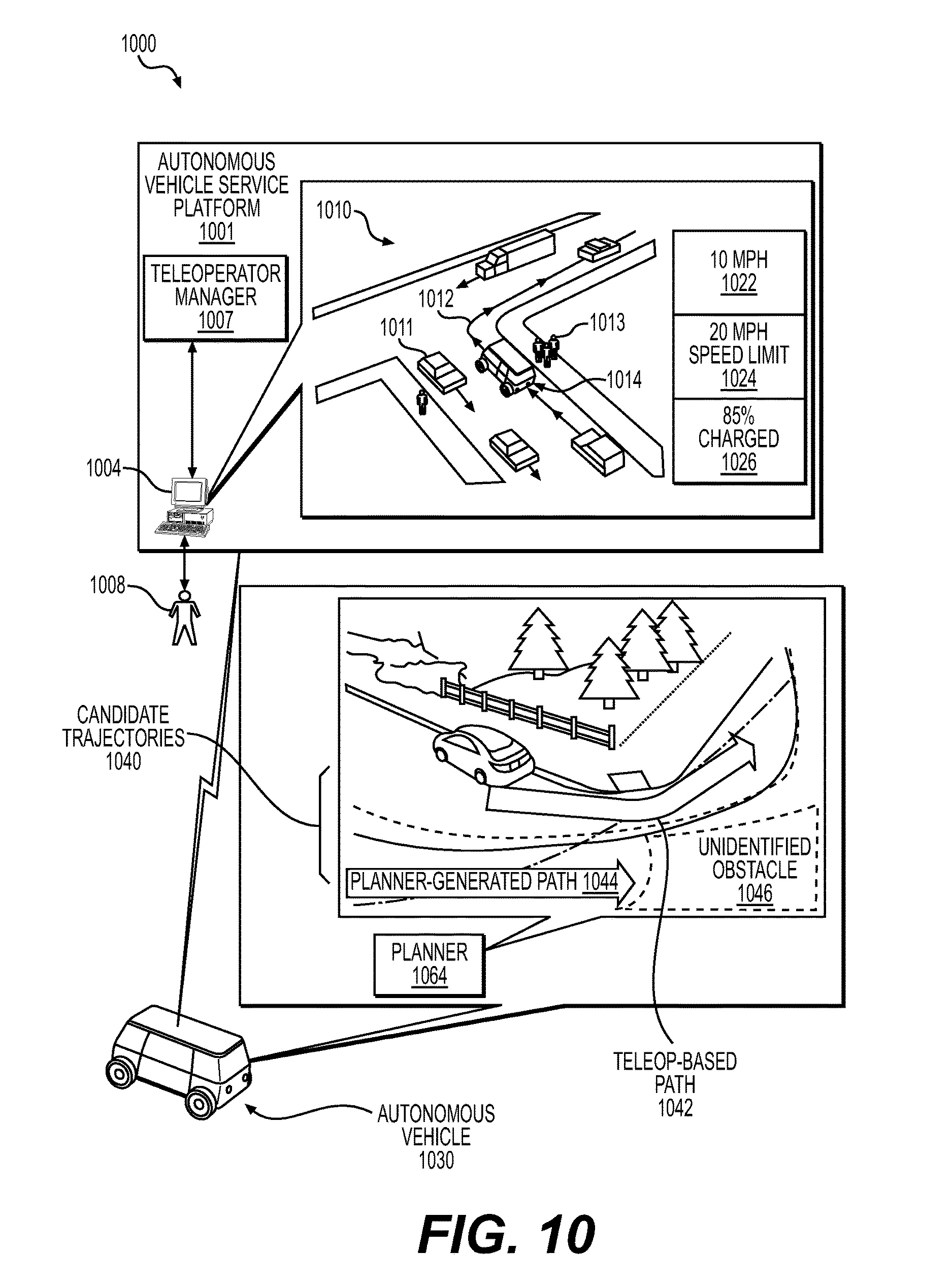
図10は、遠隔操作者が経路の操作を行う際の遠隔操作者インターフェースの例を示すものです。遠隔操作者マネージャー1007は、潜在的な障害物や計画者の信頼度が低いエリアに接近する自律走行車両の経路を、遠隔操作者1008が事前に確認できるようにするために必要なデータを受信します。
例を挙げると、自律走行車両が接近している交差点が問題があるとタグ付けされている場合があります。そのような場合、ユーザーインターフェース1010は、走行経路の計画者によって生成された多数の軌道によって予測された経路1012を通過する対応する自律走行車両1030の表現1014を表示します。また、他の車両1011や、計画者に十分な混乱を引き起こす可能性のある歩行者などの動的オブジェクト1013も表示されます。ユーザーインターフェース1010は、遠隔操作者1008に現在の速度1022、速度制限1024、および現在バッテリーにある充電量1026も提示します。ある例において、ユーザーインターフェース1010は、自律走行車両1030から取得したセンサーデータなど、他のデータも表示することがあります。
他のケースとして、計画者1064が検出された未識別オブジェクト1046に関係なく、計画者によって生成された経路1044と一致する多数の軌道を生成したとします。計画者1064はまた、候補となる軌道のサブセット1040を生成するかもしれませんが、この例では、現在の信頼度を考慮して進行することができません。計画者1064が代替経路を決定できない場合、遠隔操作リクエストが送信される可能性があります。この場合、遠隔操作者は、遠隔操作に基づく経路1042と一致する自律走行車両1030の移動を容易にするために、候補となる軌道1040の1つを選択することができます。
自動走行車両フリートの効率的な管理
この発明で開示されるシステムは、自律走行車両サービスプラットフォーム、通信レイヤー、および自律走行車両コントローラーを含む統合されたアーキテクチャを通じて、車両フリートの監視、制御、および運用を実現します。主要な機能として、自律走行車両のリアルタイムの監視、イベント発生時の適切な対応策の決定、および車両間の通信を通じた情報の共有が挙げられます。また、自律走行車両の位置決め、経路計画、障害物回避などのための高度な認識エンジンと計画エンジンを備えています。
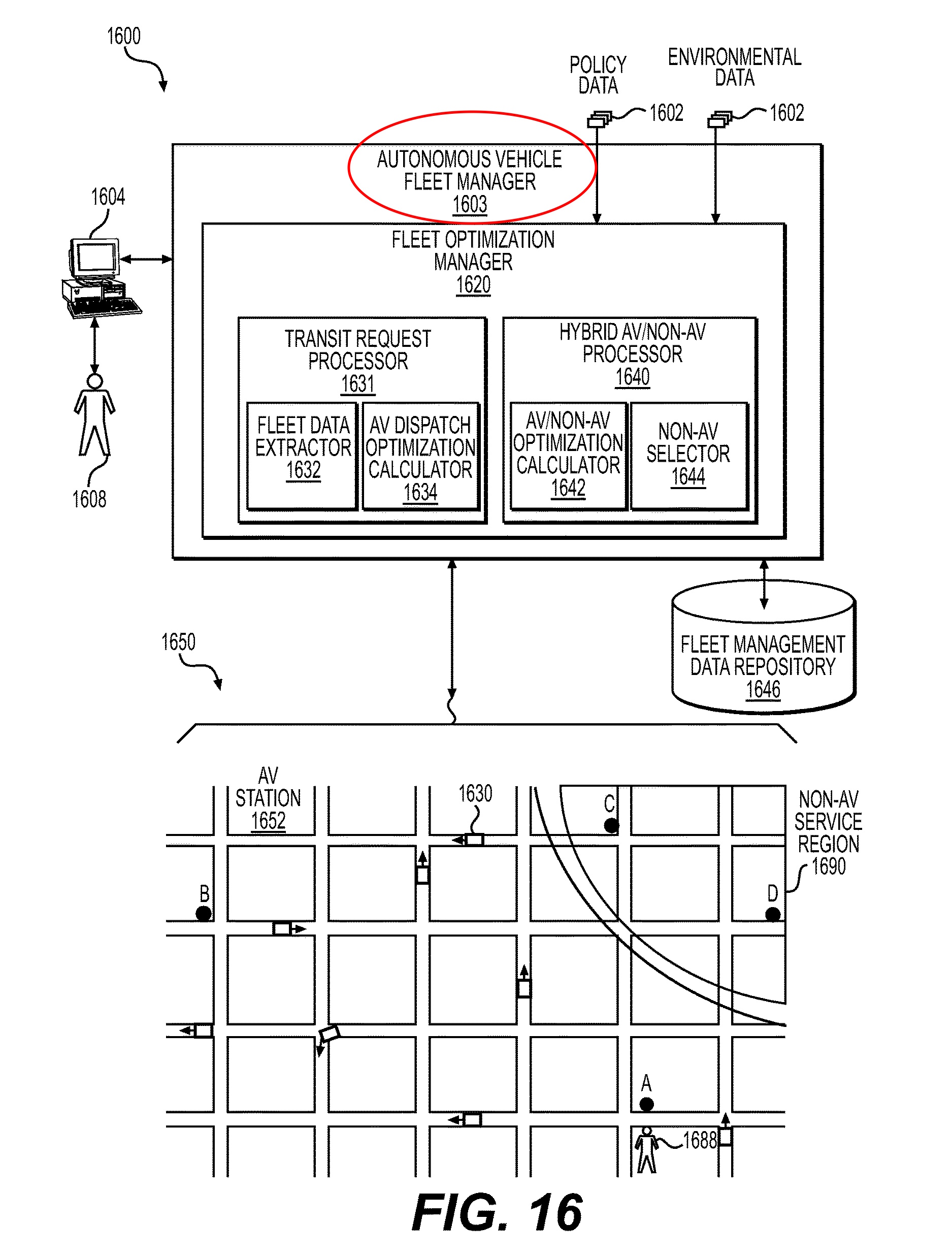
図16は、自律走行車両フリート最適化マネージャーを実装する自律走行車両フリートマネージャーの例を示す図です。1600は、道路網1650内を移動する自律走行車両1630のフリートを管理するように構成された自律走行車両フリートマネージャー1603を示しています。
自律走行車両フリートマネージャー1603は、遠隔操作者コンピューティングデバイス1604を介して遠隔操作者1608に接続され、また、フリート管理データリポジトリ1646にも接続されています。自律走行車両フリートマネージャー1603は、ポリシーデータ1602および環境データ1606、その他のデータを受信するように構成されています。さらにフリート最適化マネージャー1620が輸送リクエストプロセッサー1631を含むことが示されており、それはさらにフリートデータ抽出器1632および自律走行車両ディスパッチ最適化計算機1634を含んでいます。
輸送リクエストプロセッサー1631は、自律走行車両サービスを要求しているユーザー1688などからの輸送リクエストを処理するように構成されています。
フリートデータ抽出器1632は、フリート内の自律走行車両に関連するデータを抽出するように構成されています。各自律走行車両に関連するデータはリポジトリ1646に格納されます。例えば、各車両のデータには、メンテナンスの問題、予定されたサービスコール、日々の使用状況、バッテリーの充電および放電率、その他のリアルタイムで更新される可能性のあるデータが含まれ、これらのデータはダウンタイムを最小限に抑えるために自律走行車両のフリートを最適化する目的で使用されます。自律走行車両ディスパッチ最適化計算機1634は、抽出されたデータを分析し、フリートの最適化された使用を計算するように構成されており、次にディスパッチされる車両が、例えばステーション1652から、自律走行車両サービスのための最小の旅行時間およびコストを集計できるようにします。
このシステムは、自律走行車両が遭遇する可能性のあるさまざまなシナリオや条件に対応するために、詳細なセンサーデータと環境データを利用します。また、遠隔操作者が介入し、車両の経路計画に影響を与えることができるインタフェースも提供します。これにより、車両が独自に解決できない複雑な状況や、安全性を確保するための特別な操作が必要な場合に、人間の判断が組み込まれます。
効率的なフリート管理には、車両の状態監視、メンテナンスニーズの予測、最適な経路の選択、およびエネルギー利用の最適化が含まれます。このシステムは、自律走行車両が提供するサービスの信頼性と効率を高めることを目的としており、車両の稼働時間を最大化し、運用コストを最小限に抑えるための戦略的な意思決定をサポートします。
全体として、この特許は、自律走行車両フリートの運用を改善するための包括的なソリューションを提供し、将来の交通システムにおけるこれらの車両の統合と利用のための基盤を構築しています。
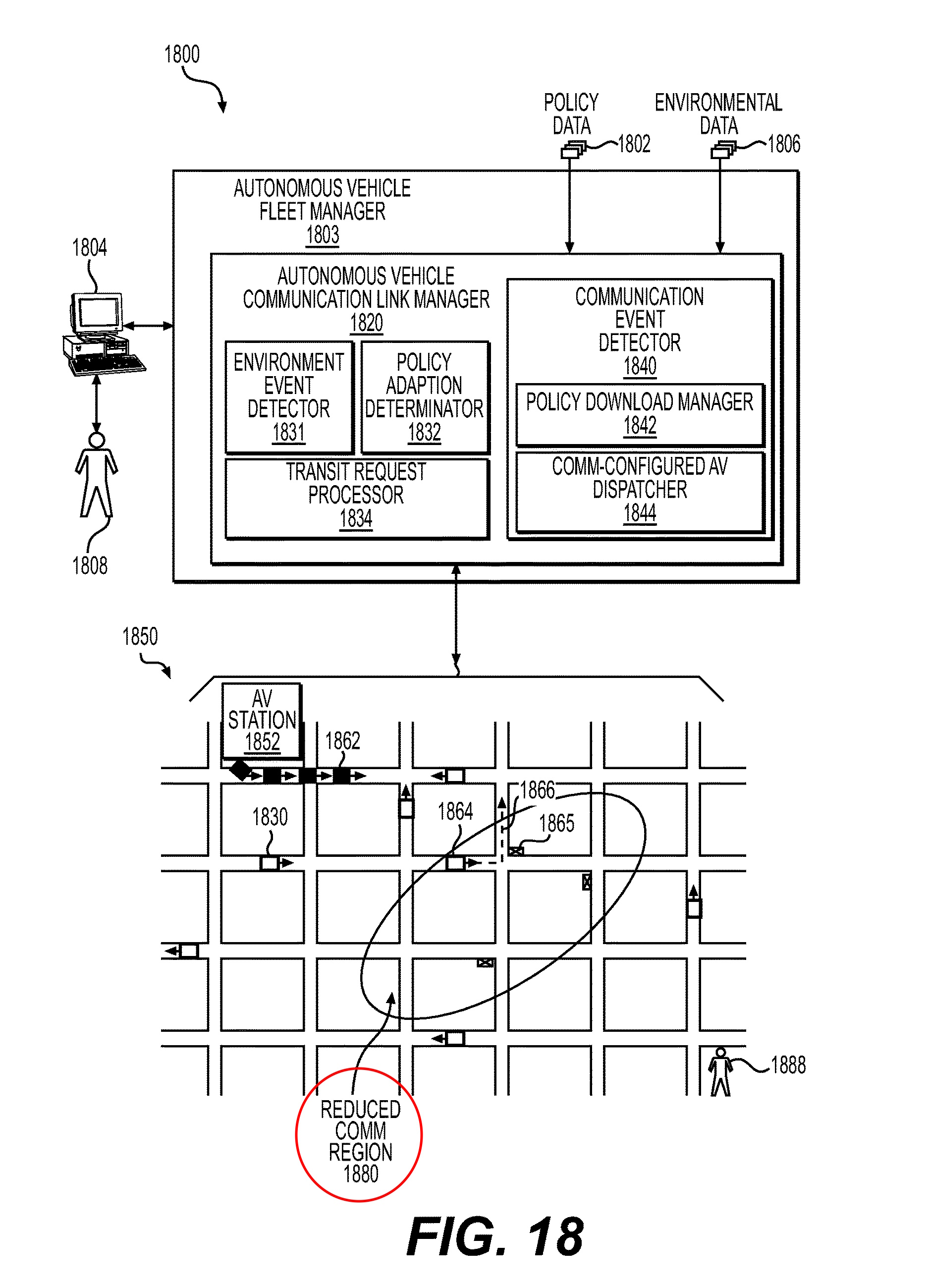
図18は、自律走行車両通信リンクマネージャーを実装する自律走行車両フリートマネージャーを示す図です。道路網1850内を移動する自律走行車両1830のフリートを管理するように構成された自律走行車両フリートマネージャー1803を示しており、この道路網は「通信低下地域」1880として特定された地域で通信アウトが発生しています。自律走行車両フリートマネージャー1803は、遠隔操作者コンピューティングデバイス1804を介して遠隔操作者1808に接続されています。自律走行車両フリートマネージャー1803は、ポリシーデータ1802および環境データ1806、その他のデータを受信するように構成されています。さらに自律走行車両通信リンクマネージャー1820が環境イベント検出器1831、ポリシー適応決定器1832、および輸送リクエストプロセッサー1834を含むことが示されています。環境イベント検出器1831は、自律走行車両サービスが実施される環境内の変化を指定する環境データ1806を受信するように構成されています。
例えば、環境データ1806は、地域1880の通信サービスが低下しており、これが自律走行車両サービスに影響を与える可能性があることを指定します。ポリシー適応決定器1832は、そのようなイベント(例えば、通信の喪失中)に輸送リクエストを受信する際に適用するパラメーターを指定します。輸送リクエストプロセッサー1834は、通信が低下した状況を考慮して輸送リクエストを処理するように構成されています。この例では、ユーザー1888が自律走行車両サービスを要求しています。さらに、輸送リクエストプロセッサー1834には、通信が悪いために生じる問題を避けるために自律走行車両がディスパッチされる方法を変更するための適応されたポリシーを適用するロジックが含まれています。
通信イベント検出器1840には、ポリシーダウンロードマネージャー1842および通信設定(”COMM-configured”)AVディスパッチャー1844が含まれています。ポリシーダウンロードマネージャー1842は、通信低下地域1880を考慮して自律走行車両1830に更新されたポリシーを提供するように構成されており、更新されたポリシーは、自律走行車両がその地域に入った場合に地域1880を迅速に抜け出すためのルートを指定するかもしれません。例えば、自律走行車両1864は、地域1880に入る直前に更新されたポリシーを受信するかもしれません。通信の喪失時、自律走行車両1864は更新されたポリシーを実装し、地域1880から迅速に抜け出すためのルート1866を選択します。COMM-configured AVディスパッチャー1844は、地域1880全体でピアツーピアネットワークを確立するためのリレーとして構成された自律走行車両を駐車するためのポイント1865を特定するように構成されます。したがって、COMM-configured AVディスパッチャー1844は、ピアツーピアアドホックネットワークで通信タワーとして機能する目的で、乗客なしで自律走行車両1862を場所1865に駐車するようにディスパッチするように構成されています。
通信およびデータ処理の最適化
本発明の主な目的は、遠隔操作を通じて、自律走行車両がナビゲーションする際の軌跡を修正することです。このプロセスには、様々なセンサーや通信手段を使用して、自律走行車両の状況を正確に把握し、必要に応じて軌跡を調整することが含まれます。遠隔操作者は、車両の現在の状態や環境データを基に、最適な経路や行動を選択して、車両が安全に目的地に到達できるよう支援します。
このシステムは、自律走行車両が直面する可能性のある様々な状況に対応するための柔軟性と、緊急時や計画外のイベントが発生した際に迅速に対応する能力を提供します。例えば、予期せぬ障害物が検出された場合や、特定の道路状況での自律走行システムの信頼性が低下した場合など、遠隔操作者が介入して車両の軌跡を修正することができます。
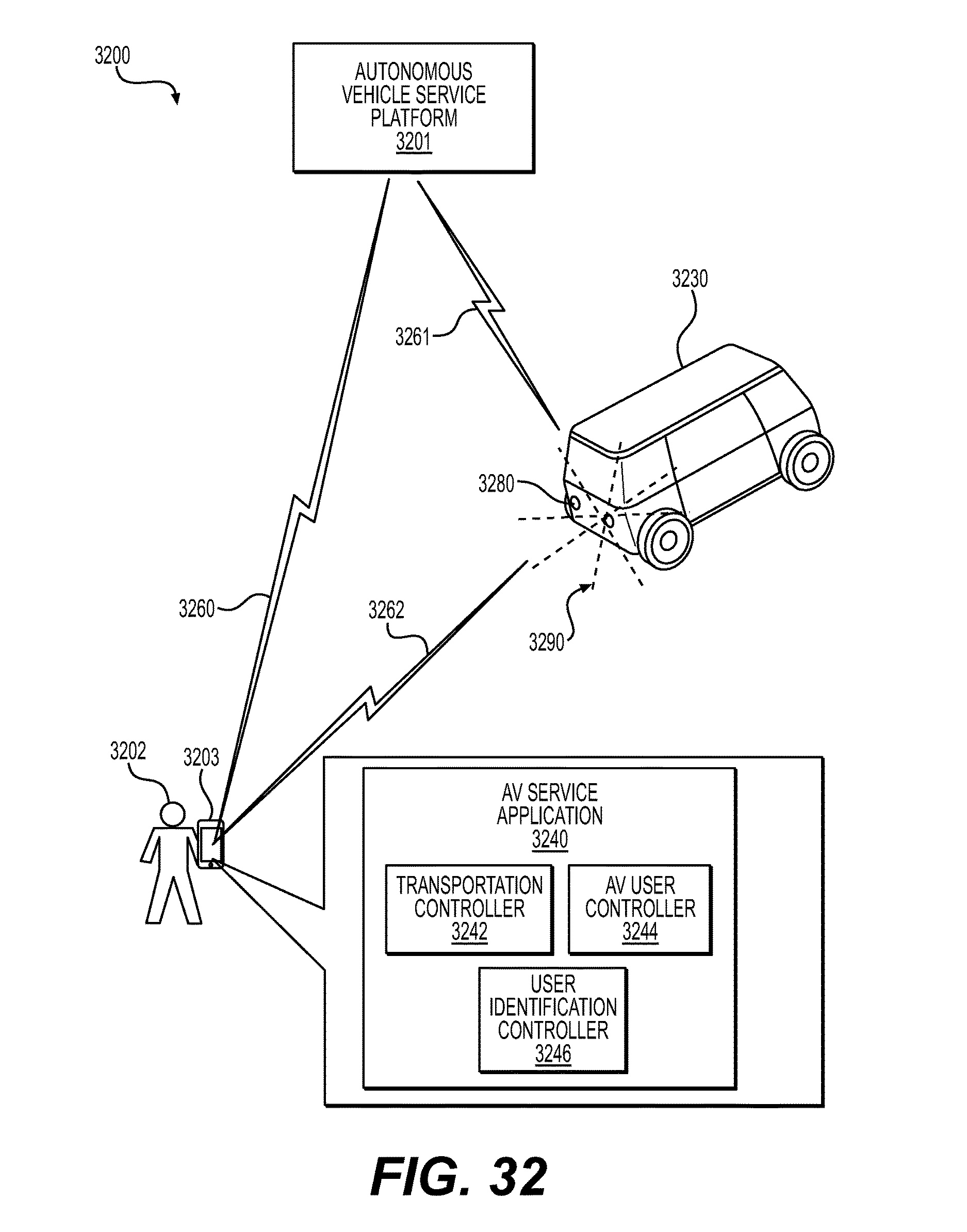
図32は、自律走行車両アプリケーションを示す図です。自律走行車両サービスプラットフォーム3201によって、ユーザー3202を自律走行車両3230を介して輸送する手配をする、自律サービスアプリケーション3240が構成されたモバイルコンピューティングデバイス3203を示しています。
輸送コントローラー3242は、ユーザー3202がユーザーの位置から目的地までの輸送を手配できるよう、自律走行車両および/または自律走行車両フリートに関連する操作を受け取り、スケジュールし、選択し、または実行するように構成されています。例えば、ユーザー3202はアプリケーションを開いて車両3230を要求することができます。アプリケーションは地図を表示し、ユーザー3202は目的地を示すためにピンをドロップすることができます。または、アプリケーションは近くの指定されたピックアップ場所のリストを表示するか、ユーザーがアドレスまたは名前で目的地を入力するためのテキストエントリーフィールドを提供してもよいでしょう。
自律走行車両アプリケーション3240には、ユーザー識別コントローラー3246も含まれており、これはユーザー3202が自律走行車両3230に近い地理的領域または近傍にいることを検出するように構成されています。場合によっては、ユーザー3202は自律走行車両3230が使用のために近づいているときにそれを容易に認識または識別できないかもしれません(例えば、都市環境で一般的なトラック、車、タクシー、およびその他の障害物のため)。一つの例では、自律走行車両3230は、ユーザー3202の自律走行車両3230に対する相対的な位置を決定するために使用されるRF信号および信号強度の相対的な方向を使用して、ユーザー3202の空間的位置を通信および/または決定するために無線通信リンク3262(例えば、WiFiまたはBluetooth®、BLEを含む、などのラジオ周波数(「RF」)信号を介して)を確立することができます。さらには、自律走行車両3230は、例えば、GPSデータなどを使用してユーザー3202のおおよその地理的位置を検出することができます。モバイルコンピューティングデバイス3203のGPSレシーバー(図示されていない)は、GPSデータを自律走行車両サービスアプリケーション3240に提供するように構成されるかもしれません。したがって、ユーザー識別コントローラー3246はリンク3260を介してGPSデータを自律走行車両サービスプラットフォーム3201に提供することができ、その後、それはその位置を自律走行車両3230にリンク3261を介して提供することができます。その後、自律走行車両3230は、ユーザーのGPSデータを車両のGPS由来の位置と比較することによって、ユーザー3202の相対的な距離および/または方向を決定することができます。
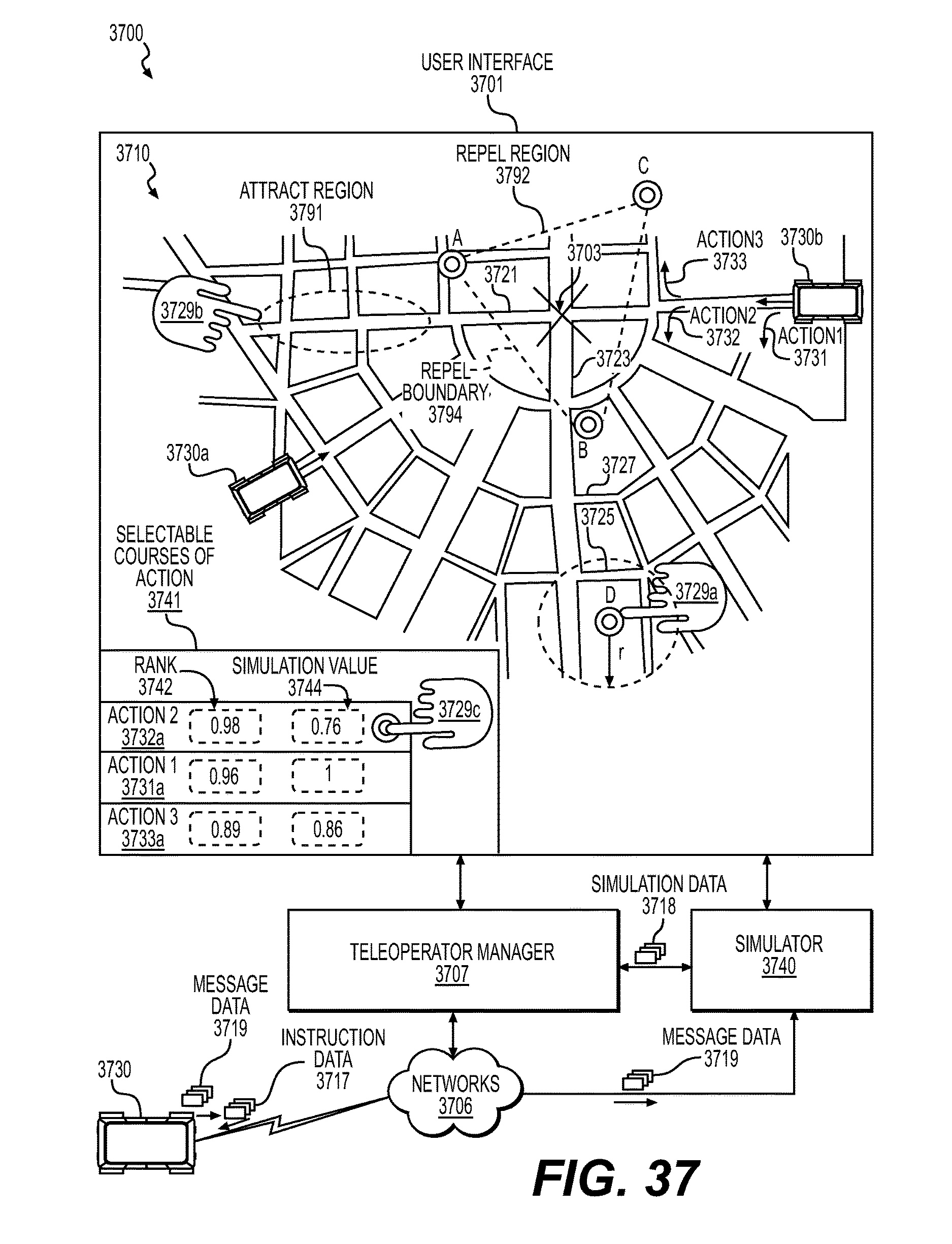
図37は、遠隔操作サービスのコマンドを容易にするユーザーインターフェースを実装する遠隔操作者マネージャーの例を示す図です。ネットワーク3706を介して自律走行車両3730と通信的に接続され、遠隔操作者との対話を容易にするユーザーインターフェース3701を実装するように構成された遠隔操作者マネージャー3707を示しています。
イベントロケーション3703が、1台以上の自律走行車両が軌跡を決定する際に複雑さのレベルを経験する可能性がある地理的位置またはその地域を示しています。複雑さのレベルは、値(例えば、数値、確率値、またはその他の適切な値)または値の範囲として表現され、軌跡の決定の精度が遠隔操作サービスで支援されるかどうかを指定することができます。ここでは、イベントロケーション3703は、道路網3710(例えば、参照または地図データ、地形データ、交通データなどに基づく)と関連付けられているとしてユーザーインターフェース3701に描かれ、イベントロケーション3703が、イベントロケーション3703によって影響を受ける可能性のある相対的に多くのルートや軌跡を通る道路セグメントのサブセットの交差点または近傍に位置していると示されています。
さらに、イベントロケーション3703は、交通事故や、自律走行車両3730における軌跡生成とルート計画が特定の複雑さや難しさのレベルを持つ可能性があることを示す(例えば、アラートデータに基づく)兆候など、イベントが発生する確率がある場所、または発生している場所かもしれません(例えば、特定の時間帯には、明るい日光が適切なセンサー操作を妨げるかもしれません)。遠隔操作者マネージャー3707は、自律走行車両がイベントロケーション3703をナビゲートするのを支援する遠隔操作サービスを提供することができます。
遠隔操作者マネージャーは、遠隔操作者が自律走行車両のナビゲーションを支援し、ガイドするために、ユーザー入力を受け付け、処理するユーザーインターフェースを提供します。ユーザー入力には、ナビゲーションポイントの設定、境界の確立(引き寄せる境界または反発する境界)、および特定の軌跡の選択などが含まれ、これらは自律走行車両がイベントロケーションを迂回するか、適切にナビゲートするのを支援します。
さらに、ユーザーインターフェースを通じて遠隔操作者は、自律走行車両に対して特定のアクション(例えば、特定の道路での左折や右折など)を指示することができ、これらのアクションは自律走行車両が安全かつ効率的に目的地に到達するための軌跡を生成または修正するのに役立ちます。遠隔操作者マネージャーは、これらのユーザー入力を基に、自律走行車両に対する具体的な指示データを生成し、送信します。
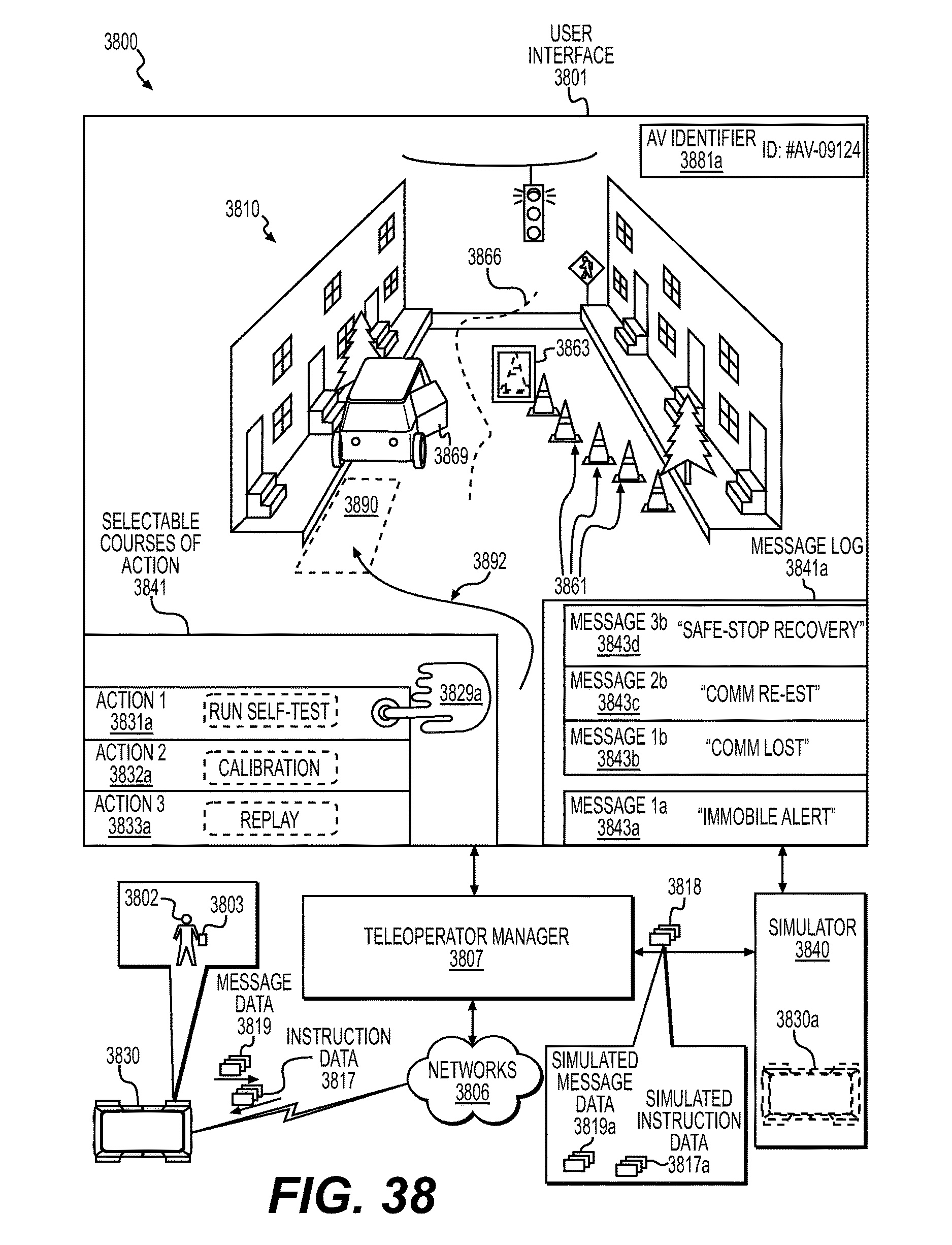
図38は、遠隔操作サービスのコマンドを容易にするユーザーインターフェースを備えた遠隔操作者マネージャーの別の例を示しています。この図では、遠隔操作者マネージャー3807が、自律走行車両3830との対話を容易にするユーザーインターフェース3801を実装するように構成されており、自律走行車両の移動方向の先行面からのビュー3810(例えば、3Dビュー)を提示することができます。
遠隔操作者マネージャー3807は、イベントに関連する情報を基に、遠隔操作者に対して行動選択肢3841、メッセージログ3841a、および自律走行車両(”AV”)識別子3881aを提示することができます。例えば、「不動アラート」を示すメッセージ3843aがあり、これは自律走行車両3830が1つ以上のイベント(例えば、信頼度レベルの範囲に関連する)に遭遇し、遠隔操作サービスが呼び出される可能性があることを示します。また、遠隔操作者マネージャー3807が通信の損失を示すメッセージ3843bを表示し、通信が再確立されたことを示すメッセージ3843cや、自律走行車両3830が安全停止回復モードまたはルーチンを実装していることを示すメッセージ3843dを生成することもできます。
さらに、遠隔操作者は、自律走行車両3830がシステムの適切な動作を検証するための自己テストルーチンを開始するユーザー入力3831aや、1つ以上のセンサーや他のコンポーネントに対する自己校正プロセスを実行するユーザー入力3832a、または通信の損失後および安全開始操作前にセンサーデータの再生を行うユーザー入力3833aを選択して実行することができます。
シミュレーター3840は、仮想環境内での仮想自律走行車両3830aとして自律走行車両3830の操作可能性をシミュレートするように構成されています。このシミュレーションを通じて、遠隔操作者マネージャー3807や遠隔操作者とユーザーインターフェース3801の相互作用など、自律走行車両サービスプラットフォームの他の機能の検証とシミュレーションが可能です。
遠隔操作者マネージャー3807は、例えば、センサーデータを境界ボックス3863として描写することで、物理環境の表現の内容を調整するための視覚化データを調整することもできます。これにより、ビュー3810を形成するためにメッセージデータ3819を介して送信されるデータの量を減らすことができます。また、開発者や乗客などのユーザー3802が、コンピューティングデバイス3803(例えば、モバイルコンピューティングデバイス)を介してメッセージデータ3819を生成したり、自律走行車両3830にそのようなデータを生成させたりすることも可能です。
図38では、遠隔操作者マネージャー3807が、遠隔操作サービスのコマンドを実行し、自律走行車両のナビゲーションを支援するためのインターフェースと機能を提供することが強調されています。これにより、遠隔操作者は、自律走行車両が直面する様々なイベントや障害物に対処し、安全かつ効率的に目的地へとナビゲートするための適切な指示やアクションを提供することができます。
図39は、テレオペレーションサービスコマンドを促進するためにユーザーインターフェースを実装するよう設定されたテレオペレーターマネージャーの別の例を示す図です。テレオペレーターマネージャー3907が、ネットワーク3906を介して自動運転車3930と通信的に接続され、テレオペレーターとのやり取りを促進するためにユーザーインターフェース3901を実装するように設定されていることを示しています。例示された例では、テレオペレーターマネージャー3907は、ユーザーインターフェース3901を介して、物理環境の一部として感知された環境の特定の部分に関連する特定のビュー3910(例えば、3Dビュー)を提示するように設定されています。この例において、ビュー3910を表すデータは、テレオペレーションコマンドを提供するためにテレオペレーターに通知されるために、自動運転車から送信されます。

シミュレーター3940は、仮想環境内の仮想自動運転車3930aとして自動運転車3930のセンサーの動作可能性をシミュレートするように構成される場合があります。このようにして、仮想自動運転車3930aはシミュレートされたメッセージデータ3819aを生成することができます。シミュレーター3940はまた、テレオペレーターマネージャー3907の機能、ユーザーインターフェース3901とのテレオペレーターの相互作用、および自動運転車サービスプラットフォームの他の機能をシミュレートするように構成されます。
ここがポイント!
この特許発明の主なポイントは、自動運転車両の軌道修正のためのテレオペレーションシステムと方法に関連しています。特に、自動運転車が直面する様々なイベントや状況に対処するために、テレオペレーターが介入し、軌道修正やナビゲーションの指示を提供できるようにするシステムを提案しています。このシステムは、自動運転車から送信されるテレオペレーションメッセージを受信し、そのメッセージ内で指定されたイベントに関連するデータを検出し、それに応じた一連の行動を識別することを含みます。これらの行動はシミュレートされ、対応するランクやシミュレーション値が計算され、テレオペレーターのコンピューティングデバイスのディスプレイに可視化データとして提示されます。
テレオペレーターは提示された行動の中から選択し、選択された行動を自動運転車に伝達します。これにより、自動運転車が独立して解決できない問題や困難な状況に対応するための追加的なサポートを提供することにより、自動運転車の安全性と効率を向上させることです。テレオペレーションの介入により、自動運転車はより複雑な環境や予期せぬ障害物、通信障害などの特定の状況での運転を改善できるようになります。
未来予想
本発明の活用は、自動運転技術の適用範囲と信頼性の拡大に寄与すると予測されます。具体的な予測としては、以下のような側面が考えられるでしょう。
1.複雑な環境下での自動運転の実現
都市部や交通量が多いエリアなど、複雑な環境下でも、テレオペレーションによる介入が可能になることで、自動運転車両の運用範囲が広がります。これにより、現在は人間のドライバーが必要とされるような状況でも自動運転車の利用が可能となるでしょう。
2.緊急時の迅速な対応
自動運転車両が予期せぬ障害物や事故に直面した際、テレオペレーションによる即座の対応が可能となります。これは、事故の回避や、緊急事態における迅速な対処により、安全性の向上に直結します。
3.自動運転車両の運用効率の向上
テレオペレーションによる軌道修正と指示の提供は、自動運転車両のルート選択や運転効率の最適化に役立ちます。これにより、目的地までの所要時間の短縮や、エネルギー消費の削減が期待できます。
4.自動運転サービスの信頼性向上
テレオペレーションシステムの導入により、自動運転車両の運用における信頼性が向上します。特に、人間の監視と介入が可能であることは、一般の利用者や規制当局に対する自動運転技術の信頼性を高める要素となるでしょう。
5.自動運転車両の適用範囲の拡大
自動運転車両の安全性と信頼性が向上することで、物流や公共交通など、新たな分野での自動運転車両の活用が進むことが予測されます。特に、物流業界では、遠隔操作による車両管理が効率的な運送業務の実現に貢献する可能性があります。
特許の概要
|
発明の名称 |
Teleoperation system and method for trajectory modification of autonomous vehicles |
|
出願番号 |
US14/932963 |
|
特許番号 |
US9507346B1 |
|
出願日 |
2015年11月4日 |
|
登録日 |
2016年11月29日 |
|
出願人 |
Zoox Inc. |
|
発明者 |
Jesse Sol Levinson 他 |
| 国際特許分類 |
B60W30/09 |
| 経過情報 |
本権利は抹消されていない(満了日:2035/11/4) |