完全自動運転車の開発でリードするグーグルの兄弟会社ウェイモ(Waymo)は自動運転車開発の先駆け的な企業だ。2005年のDARPAグランド・チャレンジ(ロボットカー・レース)に参加していたスタンフォード大学の研究チームが中心となって、2009年にグーグルの一部門として設立。2016年に分社化して現在のウェイモとなった。
この会社はご存知の通り、自動運転開発競争の火付け役として、追随する他社を寄せ付けぬ研究開発力を誇っていることでも知られている。こうした研究開発力を示す1つの指標に、特許技術が挙げられるが、その特許、日本国内でウェイモが出願した特許技術を自動運転LABが22年2月8日、いくつか紹介している。
遮蔽を伴う道路利用者反応モデリングに従って自律車両を動作させること
(出願:2019年12月3日/特願2021-532040)
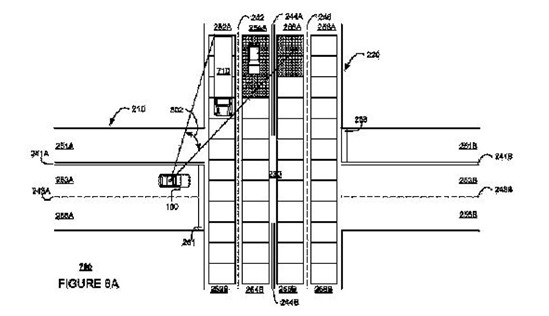 出典:J-PlatPat
出典:J-PlatPat
自動運転車を動作させる手法で、車両の環境内の遮蔽された車線セグメントを使用し、車両の環境内の道路利用者の挙動を予測する技術だ。交差点における右左折などの際、自動運転車は車両操縦のタイミングを判定するために周囲の物体の挙動を予測することが求められるが、物体が走行するだろう車線セグメントや、物体が通過すると予測される車線セグメントを遮蔽するかどうかを検出することで、複雑なマルチボディ問題を解決する必要がなく経路再計算などのプロセスを簡素化することができ、自動運転システムが予測や反応をより迅速に行うことができるとする技術のようだ。
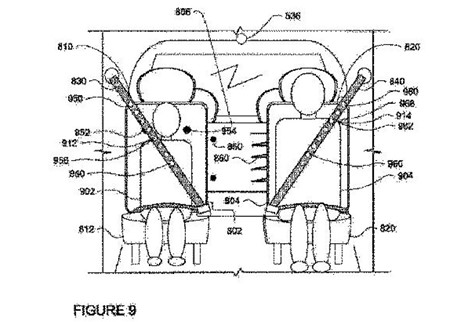
車両の内部状態の判別と応答
(出願:2019年2月19日/特願2020-541977)
 出典:J-PlatPat
出典:J-PlatPat
自動運転車が移動や輸送サービスを提供する過程で、車内の状態を自動判別する技術だ。ドライバーレスの自動運転車においては、車内の画像を人間のオペレータに直接送って確認してもよいが遠隔オペレータとのやり取りに待ち時間が発生し、乗員がシートベルトを外して車両周辺を移動する場合など、特定の状況では問題となるケースがあるという。また、車両が通信可能エリアにない場合や車両のコンピューティングデバイスと接続できないエリアにある場合、このプロセスが無効になることもあるという。
自動運転車両の画像捕捉デバイスが遭遇する光の範囲を制御するための方法およびシステム
(出願:2018年12年3日/特願2020-531521)
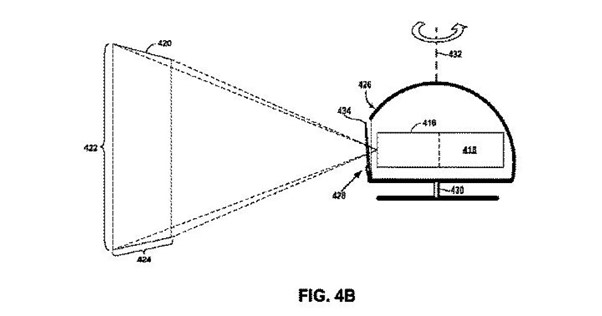
画像データを生成するように構成された画像捕捉デバイスが生成する画像データの品質は、外部光の影響で低下し得るが、この外部光の影響を制御するための方法・システムに関する技術だ。コンピューティングシステムが、画像捕捉デバイスによって生成される画像データの品質が閾値未満と判定した際、外部光の範囲を制御するために光制御を行い、閾値よりも高い状態に画像データの品質を効果的に増加させることができるといった内容の特許となっている。
なお、特許庁が2021年2月に発表した特許出願技術動向調査によると、2014~2018 年の間に日米欧独中韓で出願された自動運転関連技術は計5万3,394件で、1位トヨタ、2位フォード、3位デンソー――とトップ10は大手自動車メーカーやサプライヤーが占めている。グーグル・ウェイモは10位圏外で、自動運転における車両制御関連技術などはまだまだ既存メーカーが強さを発揮しているようだが、最新の状況では新参のテクノロジー企業のランクインも十分考えられる。
【オリジナル記事・引用元・参照】
https://jidounten-lab.com/u_33830