どんな特許?
農作物を育てた経験はありますか?
家庭菜園、あるいは小学校の授業の一環として、経験がある方も多いかと思います。毎日の水やりに加えて、肥料を追加したり、虫の対策をしたり。あるいは不要な芽、葉、果実を間引くこともしたでしょう。
良い農作物を育てるためにはこれら全てが必要不可欠なものです。しかし、家庭菜園レベルならまだしも、広い土地と多くの作物を管理する農家にとってはこれらが膨大な仕事量になることでしょう。
今回の発明は「『ドローン』そして『AI』を使い、農業を『自動化・効率化』する」ことです。
具体的な仕組み
例えばある農作物を育てている農地(図中3)で、その上空にドローン(図中無線航空機10)を飛ばします。
ドローンはカメラとGPSを搭載し、画像と位置情報を記録できます。
ドローンは農地の区画ごとに農作物の生育状況を撮影し、その画像をもとにAIによって生育状況の良し悪しを判断します。
その結果を位置情報とともにタブレットやPCなどの端末(図中100)に送信します。
結果を受け取った農家の方は、位置情報をもとに必要なところに必要な分だけ肥料や農薬を追加します。
ドローンに搭載する機能によっては、この追加作業さえも自動化が可能なんだとか。
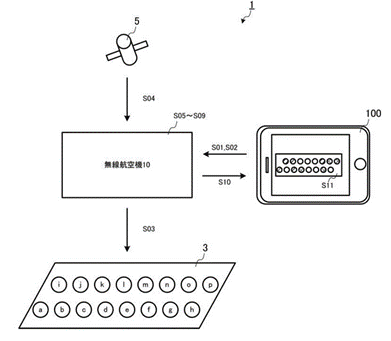
【図1】特許のシステムの構成概略
これを応用すれば、適切な収穫期の判断、虫や獣などの被害監視など、農業にかかわる様々な作業を効率化できることでしょう。
人類は増え続けています。一方で、食料の供給源たる農業に携わる人は減る一方です。少ない人手でも最大限の効率を出す。ドローンやAIの力を借りたスマートな農業がこれからの主流になるのかもしれません。
いままでのドローンとの違い
従来、無線航空機(ドローンのようなモータで回転するプロペラ機)によって『画像を撮影し、位置情報を取得し、それを端末に送信するような技術』について、従来は画像と位置情報を情報処理するセンター(施設)に一度送信し、それをセンターで処理した上で端末に送信していました。
この場合にはシステム全体のコストが高くなり、かつ複数・複雑な処理が困難であるという課題が存在しました。
本発明によれば、システムコストを抑制しつつ、画像・位置情報処理の簡略化、必要な情報の抽出が可能な無線航空機、位置情報出力方法および無線航空機用プログラムを提供することが可能となります。
これにより、農薬の劇的な削減が実現できたばかりでなく、一連の動作を人を介さずにAI及びドローンによって行うため、農薬散布時の人的健康リスクも低減できるという結果が得られたそうです。
特許の権利範囲
請求項
- 空中を飛行する無線航空機であって、
- ライブ画像を撮影するカメラ手段と、
- 身が位置する位置情報を検知可能な位置情報検出手段と、
- 抽出した対象に関する特定画像を記憶する特定画像記憶手段と、
- 前記カメラ手段が撮影したライブ画像と、前記特定画像とを比較して、前記ライブ画像から抽出したい対象を認識する対象認識手段と、
- 前記対象を認識した際に、前記位置情報検出手段が検知した現在位置を出力する位置情報出力手段と、
- 自身が、現在位置を出力した位置に移動した場合には、前記特定画像の種類に応じて、所定の装置を駆動する装置駆動手段と、
- を備えることを特徴とする無線航空機。
ここがポイント!
無線航空機ならびにそれが搭載されたプログラムが『画像の撮影』『画像認識』『撮影場所の現在位置取得』『必要な情報の抽出』『端末への送信』の全ての処理をおこなうことにあります。
何に活用されてるの?
 © OPTiM Corp.
© OPTiM Corp.
当該特許の利用例の一つとして、『農業分野においてドローンやロボットなどを用いたピンポイント農薬散布栽培への活用ができます。
ドローン・ロボットなどが圃場の上を飛行して撮影を行います。
撮影された画像と、病害虫が発生している画像をAIを用いて比較判定を行い、発生地点にて農薬散布機能を駆動します。これにより、病害虫が発生している地点のみピンポイントで農薬を散布することができます。 』とのことです。
この内容は、特許内に記載がある、無線航空機による画像撮影、画像認識・診断処理、位置情報の取得、端末への送信に該当します。以下のように対応していると思われます。
|
無線航空機による画像撮影 |
ドローン・ロボットなどが圃場の上を飛行して撮影 |
|
画像認識・診断処理 |
撮影された画像と、病害虫が発生している画像をAIを用いて比較判定 |
|
端末への送信 |
PC,タブレットなどへの操作端末への情報送信 |
|
必要な処理の実行 |
農薬散布機能を駆動 |
この例以外にも、農作物に対する肥料散布の必要性判断、収穫可能かの判断などにも応用可能と思われます。
特許の概要
|
発明の名称 |
無線航空機、位置情報出力方法及び無線航空機用プログラム |
|
出願番号 |
特願2015-130293 |
|
公開番号 |
特開2017-16271 |
|
特許番号 |
特許第6326009号 |
|
出願日 |
平成27年6月29日(2015.6.29) |
|
公開日 |
平成29年1月19日(2017.1.19) |
|
登録日 |
平成30年4月20日(2018.4.20) |
|
審査請求日 |
平成28年2月19日(2016.2.19) |
|
出願人 |
株式会社オプティム |
|
発明者 |
菅谷 俊二 |
|
国際特許分類 |
G06T 1/00 (2006.01) B64C 39/02 (2006.01) B64D 47/08 (2006.01) H04N 5/225 (2006.01) H04N 5/232 (2006.01) |
|
経過情報 |
出願審査請求後、2回の拒絶と2回の手続き補正ならびに意見書の提出によって特許査定に至る。現在に至るまで特許料は納付されており、当該申請の権利は抹消されていない。 |
<免責事由>
本解説は、主に発明の紹介を主たる目的とするもので、特許権の権利範囲(技術的範囲の解釈)に関する見解及び発明の要旨認定に関する見解を示すものではありません。自社製品がこれらの技術的範囲に属するか否かについては、当社は一切の責任を負いません。技術的範囲の解釈に関する見解及び発明の要旨認定に関する見解については、特許(知的財産)の専門家であるお近くの弁理士にご相談ください。