

スクリーン野球の必須システム

「スクリーン野球」ってご存知でしょうか。スクリーンゴルフというのは結構前からカラオケやバー・カフェ、ゴルフ用品店などに併設されていたりして、利用された方もいらっしゃるかも知れません。スクリーン野球はスクリーンゴルフの野球版でして、小さいブース面積でバーチャルなバッティングが楽しめる、シミュレーションスポーツの一つです。
このようなスクリーン野球は、スクリーン側からピッチングマシンでボールを射出し、このボールをバットで打つ、という遊び方をするのですが、打球の軌跡がスクリーン内に映し出されるのが楽しいわけです。このようなリアルタイムでの映像は、射出されたボールや打撃されたボールを、主として天井に設置されたハイスピードカメラで撮影し、その位置を高速演算することで映像化されます。
しかし、このようなスクリーン野球のシステムは当然ながら屋内にブースを設営するのですが、屋内環境は照明の明るさがまちまちで、照明条件が異なる場所によってはカメラでのボールの位置が正確に測れないという問題がありました。今回紹介する発明は、スクリーン野球のボール位置の判断方法に関するものです。
発明の背景
本発明は、照度の変化に関係なく、常にボールの位置を正確に判断することができる野球ゲームシステムに関します。
従来、野球選手になったような感覚をバッティングマシーンで味わうことはできました。バッティングマシーンは進化し続け、野球ゲームシステムへと変化してきました。
例えば、投げ出されるボールと連動するように、ピッチャーの投球フォームがスクリーンに映し出され、スクリーン上の投手が投げた瞬間にバッターへ向けてボールが投げ出されるような野球ゲームシステムが知られています。
また、投げ出されたボールを追跡するだけでなく、バッター(ゲーム参加者)が実際に打ち返したボールを追跡して、飛距離などを算出し、表示してくれるような野球ゲームシステムが知られています。
ボールの追跡は、例えば、カメラを備えた撮影部が映像を撮影することによっておこないます。
このような野球ゲームシステムは、例えば室内に設置されます。野球ゲームシステムが室内に設置される場合、室内の照度(明るさ)は、人工照明の明るさに影響されます。
照明の明るさが変化すると、撮影領域(すなわち、ボールを追跡するために撮影部が撮影する領域)の照度が変わる場合があります。撮影領域で照度が変わると、その照度で撮影された映像の輝度が影響を受けます。
例えば、撮影領域の照度が高いほど、撮影映像のボールが実際よりも大きなサイズで認識されてしまいます。一方、撮影領域の照度が低いほど、撮影映像のボールが実際よりも小さなサイズで認識されてしまいます。したがって、照度の変化によって、地面からのボールの高さが誤って認識されるという問題が発生する可能性があります。
どんな発明?
本発明は、このような問題点を解決するために考え出されました。本発明の目的は、撮影領域の照度(明るさ)に応じて撮影映像の輝度を補正することによって、照度の変化に関係なく、常にボールの正確な位置情報を認識できる野球ゲームシステムを提供することです。
このような野球ゲームシステムの発明の具体例について、以下に説明します。
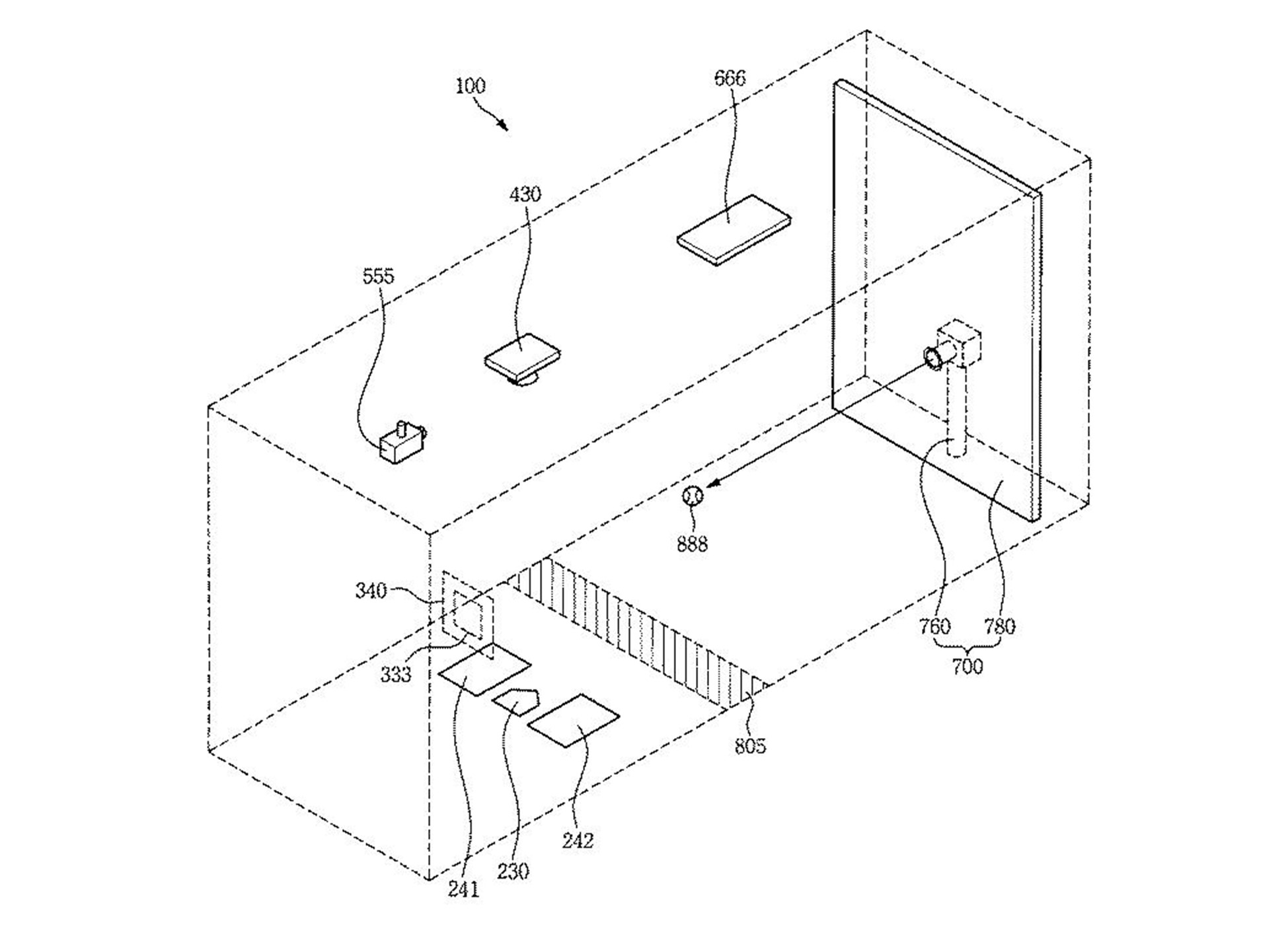
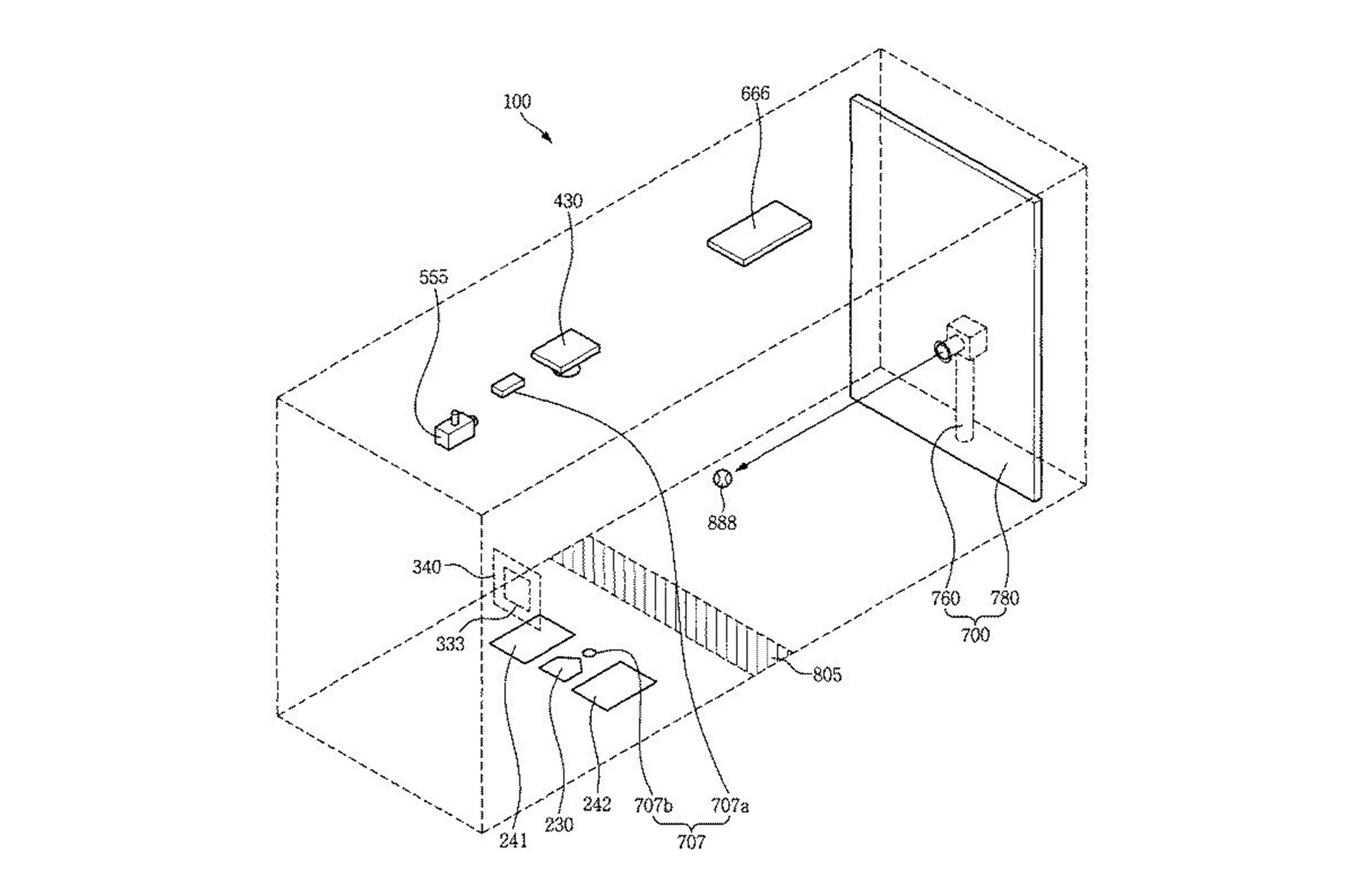
図1は、本発明の野球ゲームシステムの一例を概略的に示した斜視図です。
 【図1】
【図1】
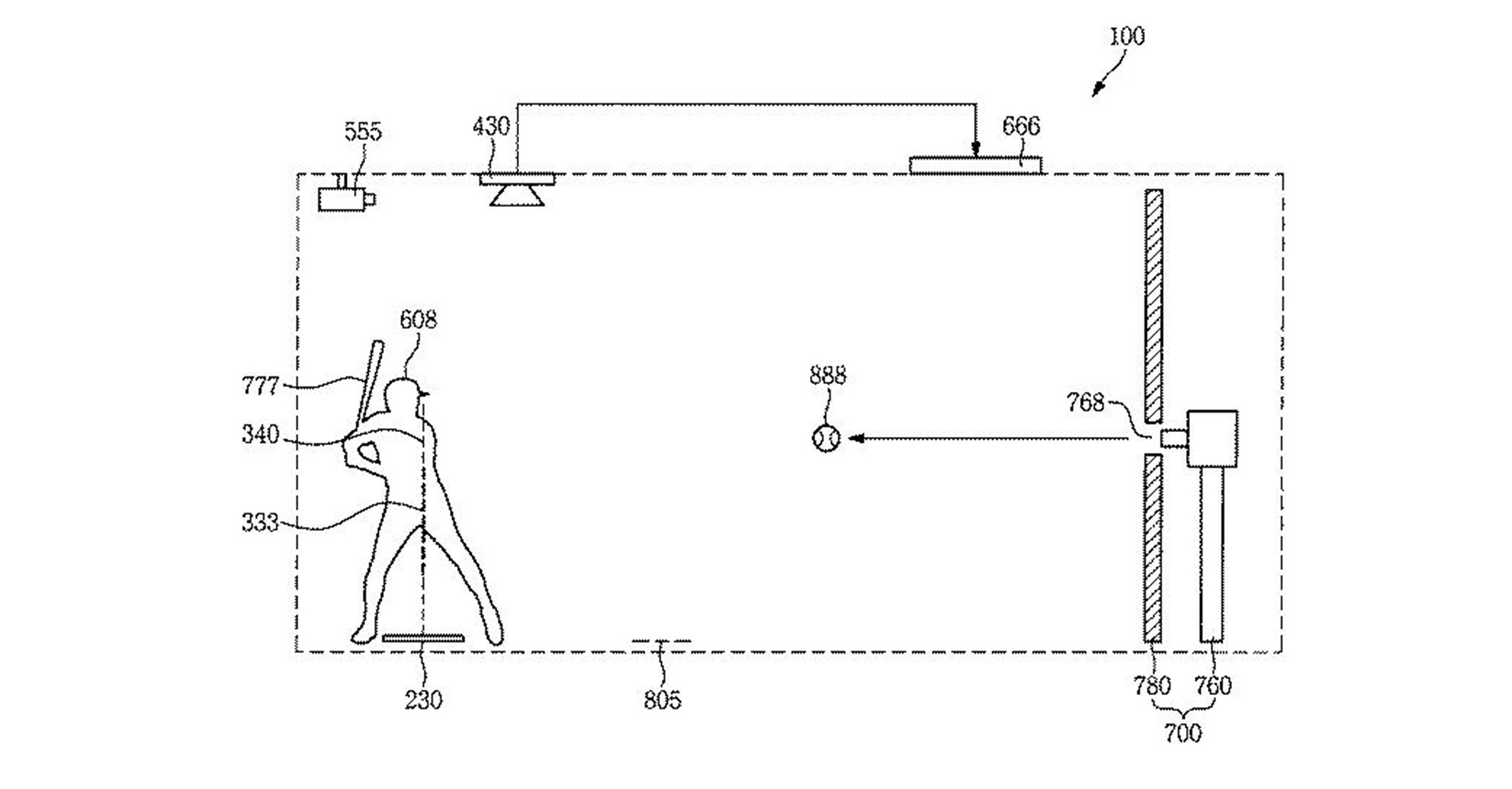
図2は図1の側面図です。
 【図2】
【図2】
本発明に係る野球ゲームシステム100は、図1および図2に示すように、ピッチング部700、撮影部430、プロジェクター555、位置検出部666、第1の打席241、第2の打席242、および、ホームプレート230を備えます。
ピッチング部700は、第1の打席241と第2の打席242との間にある判定領域340に向かってボール888を投げるように設計されています。
判定領域340のなかに、ストライクゾーン333があります。言い換えますと、判定領域340の一部がストライクゾーン333です。判定領域340は、例えば、第1の打席241と第2の打席242との間(左右のバッターボックスの間)に配置されています。
判定領域340は、上下方向では、ホームプレート230と、ストライクゾーン333の上端よりも高い所定位置との間に設けることができます。
ピッチング部700は、スクリーン780およびピッチングマシン760を有します。
スクリーン780は、判定領域340とピッチングマシン760との間に設置されます。スクリーン780は、プロジェクター555から投射された映像を表示します。図2に示すように、スクリーン780には、少なくとも一つのホール(孔)768が形成されています。
ピッチングマシン760は、スクリーン780の後方に設置されます。つまり、ピッチングマシン760は、スクリーン780の表示面の反対側に設置されます。ピッチングマシン760は、ボール888を投球するように設計されています。ピッチングマシン760から投球されたボール800は、スクリーン780のホール(孔)768を通って判定領域340へ向かって進みます。
撮影部430は、ピッチング部700からのボール888が感知領域805に進入したときに、ボール888を感知して撮影を開始します。例えば、撮影部460は、ボール888が感知領域805に進入したらすぐにボール888の追跡を開始します。撮影部430の超高速カメラによって、ボール888が感知領域805に進入した瞬間から毎秒数10~数100フレームの速さで連続的に撮影できます。
撮影部430は、判定領域340の上部に設置されます。例えば、撮影部430は、図2に示すように、判定領域340の真上ではなく判定領域340よりも少し斜め上に設置されます。
位置検出部666は、撮影部430によって撮影された映像に基づいてボール888の位置を検出します。撮影部430から提供された映像は、複数の映像(フレーム映像)を含みます。
位置検出部666は、映像を分析して判定領域340でのボール888の座標(XY座標)を検出できます。座標を検出するために、位置検出部666は、例えば、撮影部430からの各映像をその撮影照度に基づいて2値化(白黒化)してモノトーン画像を生成します。
そして、モノトーン画像を上下方向と左右方向にスキャンして映像におけるボールの輪郭線を抽出します。さらに、その輪郭線からボールの中心位置を判別し、ボールの中心位置とボールの軌跡とに基づいて、ボールの位置を検出できます。
位置検出部666から検出されたボールの座標情報は、判定部(図示せず)に送信されます。判定部は、検出されたボールの座標が判断領域のなかのストライクゾーン333に入っているかどうかを判断します。
判断した結果、ボール888がストライクゾーン333よりも内側または境界にあると判断された場合、判定部は、「ストライク」を宣言します。一方、判断した結果、ボールがストライクゾーン300から外れたと判断された場合、判定部は、「ボール」を宣言します。
また、判定部は、スイング判断部(図示せず)からの判断結果と、位置検出部666からの検出結果とに基づいて、最終的な「ボール」または「ストライク」を判定します。例えば、スイング判断部は、撮影部430からの映像に基づいて、打者608のバット777がスイングされたか否かを判断できます。
撮影部によって撮影された映像(以下、撮影映像という)には、ボールの映像が含まれています。詳しくは、ピッチング部から判定領域に向かって投球されたボール、または、バッターによって打撃されたボールの映像が含まれています。
ボールの映像は、撮影部430に近いほど、大きいサイズになります。つまり、撮影されたボールのサイズは、地面(またはホームプレート230)からのボール800の高さを間接的に示しています。よって、撮影されたボール800のサイズから、ボール800の高さを把握できます。
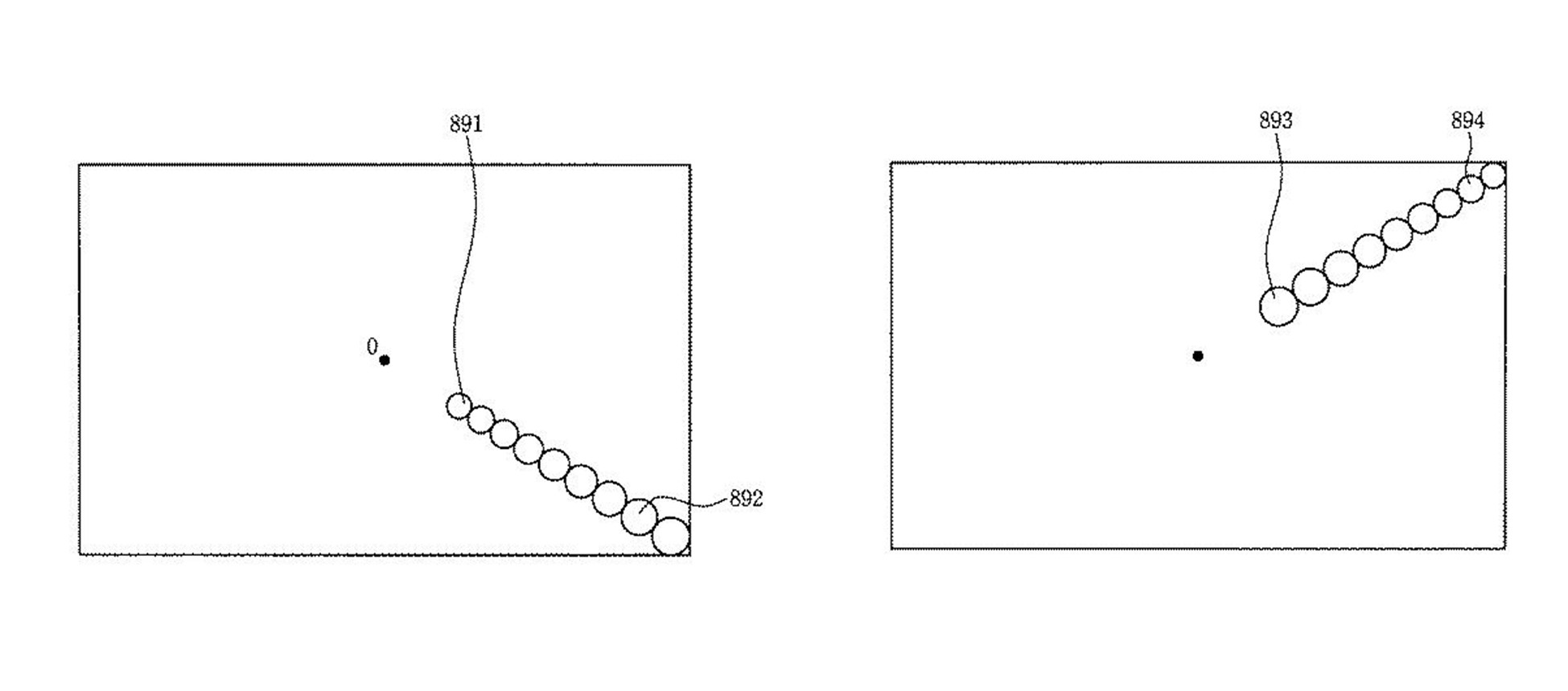
図3および図4は、かなり短い時間間隔で撮影された計9つの映像を重ねた図です。
 【図3】及び【図4】
【図3】及び【図4】
中心Oに近いほど、時間的に先に撮影されたボール891の映像であり、中心Oから遠いほど、時間的に後に撮影されたボール892の映像です。
先に撮影されたボール891よりも後に撮影されたボール892の直径が大きい場合、位置検出部666は、ボールが徐々に上昇していると判断します。これに対して、図4に示すように、先に撮影されたボール893よりも後に撮影されたボール894の直径が小さい場合、位置検出部666は、ボールが徐々に下降していると判断します。
本発明の野球ゲームシステムは、屋外だけでなく室内にも設置できます。野球ゲームシステムが室内に設置された場合、室内の照度は、人工照明に左右されます。照明の明るさに応じて、撮影領域(すなわち、撮影部によって撮影される領域)の照度が変化します。撮影領域の照度が変化すると、撮影された映像の輝度が影響を受けます。
例えば、撮影領域の照度が高いほど、撮影映像のボールのサイズは、より大きく認識される一方、撮影領域の照度が低いほど、撮影映像のボールのサイズは、より小さく認識されます。したがって、照度が変化すると、ボールの高さが誤って認識されるという問題点が発生する場合があります。
このような問題点を解決するため、位置検出部では、撮影部から提供された撮影映像と、予め設定された基準映像とを比較し、比較結果に基づいて、撮影映像の輝度を調節することによって補正映像を生成します。その補正映像に基づいて、投球されたボールの位置および打撃されたボールの位置を検出するのです。
撮影映像の輝度値が基準映像よりも小さいとき、位置検出部は、撮影映像の輝度を増加させて補正映像を生成します。例えば、位置検出部は、撮影映像の輝度と基準映像の輝度とが等しくなるように撮影映像の輝度を増加させることができます。
一方、撮影映像の輝度値が基準映像よりも大きいとき、位置検出部は、撮影映像の輝度を減少させて補正映像を生成します。例えば、位置検出部は、撮影映像の輝度と基準映像の輝度とが等しくなるように撮影映像の輝度を減少させることができます。
なお、撮影映像の輝度値が基準映像と同じであるとき、位置検出部は、例えば撮影映像の補正を行わず、投球されたボールや打撃されたボールの位置を、撮影映像に基づいて(補正映像を生成せずに)検出できます。
図5は、図1の位置検出部のブロック構成図です。
 【図5】
【図5】
位置検出部666は、図5に示すように、基準映像と撮影映像とを比較する映像比較部666aを有します。また、映像比較部666aで比較した結果に基づいて補正映像を生成する映像補正部666bを有します。さらに、映像補正部666bで生成した補正映像に基づいて、ボールの座標を生成する座標生成部666cを有します。
以下、図6a~図6eを参照して位置検出部の動作(演算処理)を説明します。
 【図6a】および【図6b】
【図6a】および【図6b】
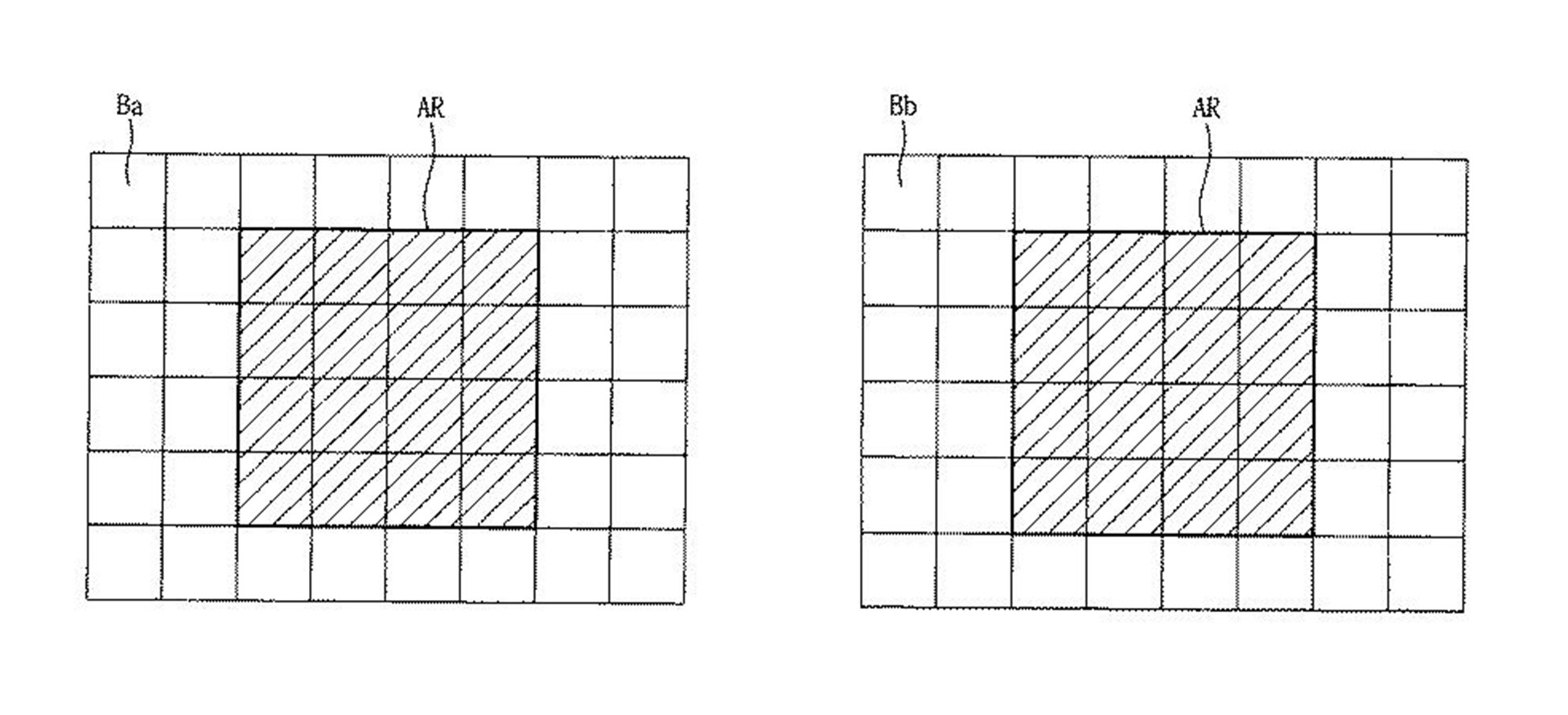
図6aは、1フレームの基準映像に含まれる「ブロック輝度データ」の空間的な配置を示します。
1フレームの基準映像は、図6aに示すように、複数の「ブロック輝度データBa」、例えば48個の「ブロック輝度データBa」を含みます。48個の「ブロック輝度データBa」は、例えば図6aに示すように、8×6のマトリックス状に配置されます。すなわち、図6aに示される全部の四角形のそれぞれが「ブロック輝度データBa」です。
各「ブロック輝度データBa」は、複数の“単位輝度データ”(図示できないため図示せず)を含みます。
各「ブロック輝度データBa」の“単位輝度データBa”は、その「ブロック輝度データBa」の輝度値を含みます。例えば、1つの「ブロック輝度データBa」の輝度値は、多数の単位画素の“単位輝度データ”の輝度値を平均した値です。“単位輝度データ”は、撮影部430の単位画素に対応する輝度データです。単位画素としては、赤色画素、緑色画素、および青色画素などがあります。
要約しますと、赤、緑、青といった多数の単位画素の“単位輝度データ”の平均値から、1つの「ブロック輝度データBa」の輝度値が求められます。
映像比較部666aでは、基準映像の「ブロック輝度データBa」のうちの特定の領域(AR:斜線で表示された領域)が選択されます。例えば、図6aに示すように、映像比較部は、基準映像に含まれる全48個の「ブロック輝度データBa」のうち、4×4のマトリックス状に配置された16個を選択します。
図6bは、1フレームの撮影映像に含まれる「ブロック輝度データ」の配置を示す図です。
1フレームの撮影映像は、図6bに示すように、複数の「ブロック輝度データBb」を含みます。例えば、1フレームの撮影映像は、48個の「ブロック輝度データBb」を含みます。48個の「ブロック輝度データBb」は、図6bに示すように、8×6のマトリックス状に配置されます。すなわち、図6aに示される全部の四角形のそれぞれが「ブロック輝度データBb」です。
詳細については、上述した「ブロック輝度データBa」と同様です。
次に、映像比較部666aは、撮影映像から選択された「ブロック輝度データ」と、基準映像から選択された「ブロック輝度データ」とから、「差引輝度データ」を生成します。
具体的には、それぞれ位置が対応するブロックを互いに比べ、一方の輝度データから他方の輝度データ差し引きます。例えば、図6bの特定の領域(斜線領域)のうち、最も左上の1つの「ブロック輝度データ」(以下、第1のブロック輝度データ)から、図6aの特定の領域のうち、最も左上の1つの「ブロック輝度データ」(以下、第2のブロック輝度データ)が差し引かれます。
つまり、第1のブロック輝度データの輝度値から第2のブロック輝度データの輝度値が差し引かれます。差し引かれた結果の輝度値が“差引輝度値”であり、その“差引輝度値”を有するデータが「差引輝度データ」です。図6aおよび図6bのような場合には、計16個の「差引輝度データ」が生成されます。
映像補正部666bは、映像比較部666aからの「差引輝度データ」のうち、予め設定された基準範囲内にある「差引輝度データ」を選択します。以後、映像補正部666bは、その選択された「差引輝度データ」の個数と、予め設定された“しきい値”とを比較します。選択された「差引輝度データ」の個数が“しきい値”よりも大きい場合、映像補正部666bは、選択された「差引輝度データ」の平均輝度値を算出します。
次に、映像補正部666bは、生成された平均輝度値に基づいて、撮影映像の輝度を補正します。補正された撮影映像データが補正映像です。
このような複雑な演算処理をする理由は、「差引輝度データ」にばらつきが生じて異常値が出た場合に、異常データを含んだ値を使って、補正するか否かが判断されると、判断ミスをしてしまうおそれがあるためと思われます。差し引きによって値を算出し、算出した値が“しきい値”よりも大きいか小さいかをわざわざ判断することで、上記のような異常データの影響を少なくすることができると考えられます。
このような映像補正部666bの動作(演算処理)を図6cおよび図6dを参照して具体的に説明すると、次の通りです。
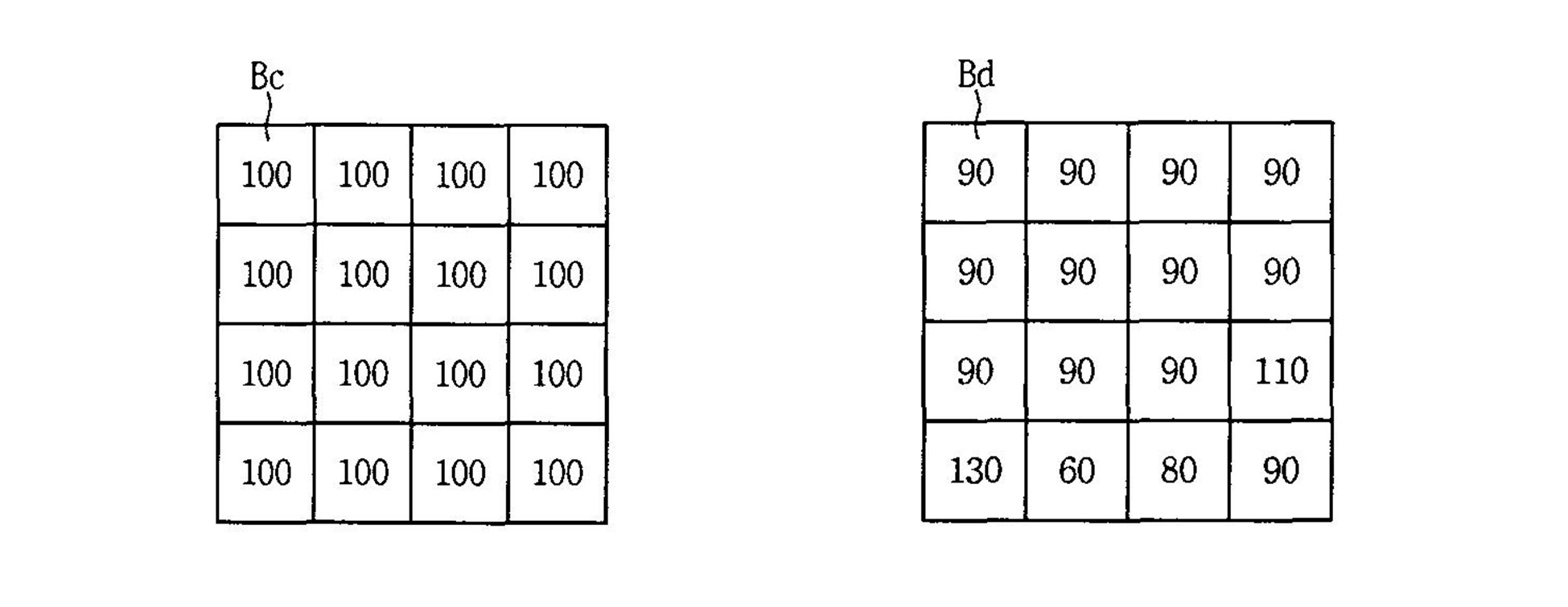
図6cは、図6aに示された基準映像の輝度データのうち、特定の領域(斜線領域)に属する「ブロック輝度データ」だけを別途示しています。
 【図6c】および【図6d】
【図6c】および【図6d】
図6cの各「ブロック輝度データBc」上に記載された数値は、その「ブロック輝度データBc」の輝度値を示します。図6cに示された例のように、基準映像から選択された「ブロック輝度データBc」の輝度値は、すべて100です。例えば、図6cに示すように、前述した第2のブロック輝度データの輝度値(最も左上)は、100です。
図6dは、図6bに示された撮影映像の輝度データのうち特定の領域(斜線領域)に属する「ブロック輝度データ」だけを示しています。
図6dの各「ブロック輝度データBd」上に記載された数値は、その「ブロック輝度データBd」の輝度値を示します。図6dに示された例のように、撮影映像から選択されたブロック輝度データのそれぞれの輝度値は、90、130、60、または80のいずれかです。例えば、図6dに示すように、前述した第1のブロック輝度データの輝度値(最も左上)は、90です。
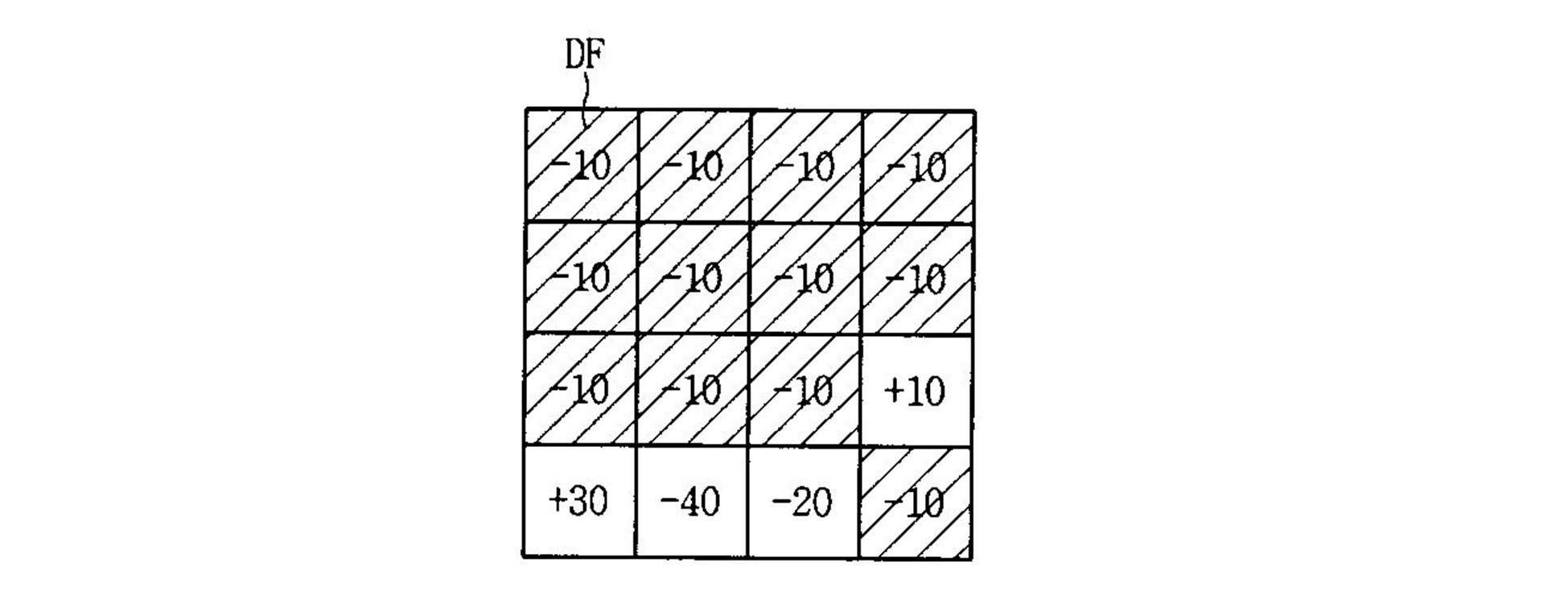
図6eは、図6dに示された(撮影映像の)「ブロック輝度データ」から、図6cに示された(基準映像の)「ブロック輝度データ」を差し引いた「差引輝度データ」の空間的な配置を示す図です。
 【図6e】
【図6e】
図6eに示された数値は、互いに対応するブロック輝度データの差を示します。例えば、前述した第1の「ブロック輝度データ」(最も左上)の輝度値90から第2の「ブロック輝度データ」(最も左上)の輝度値100を差し引いた値は-10となります。この数値は、その該当「ブロック輝度データ」間の差に相当する「差引輝度データDF」の輝度値です。図6eに示すように、「差引輝度データDF」は、-10、+10、+30、-40、または-20のいずれかの値になります。
続いて、図6eの「差引輝度データDF」のうち、基準範囲内となった差引輝度データが選択されます。基準範囲は、例えば以下のような[式1]および[式2]に示されます。
-15<Y<-5
[式1]
5<Y<15
[式2]
[式1]および[式2]において、Yは「差引輝度データ」の輝度値を意味します。
図6eの「差引輝度データDF」のうち、[式1]を満たす-10の輝度値となった差引輝度データは、計12個です。また、図6eの「差引輝度データDF」のうち、[式2]を満たす+10の輝度値となった差引輝度データは、計1個です。
“しきい値”は、例えば、特定領域の「差引輝度データDF」の総本数の60%に相当する数値に設定できます。このとき、小数点以下は四捨五入されます。
具体的な例として、図6eのように、計16個の「差引輝度データDF」がある場合、“しきい値”として“10”(≒16×0.6)を設定できます。“しきい値”が“10”であれば、[式1]を満たす「差引輝度データ」の個数12は、“しきい値”を超えています。その結果、次の処理を進め、[式1]を満たす「差引輝度データ」の平均輝度値が算出されます。図6eの例の場合、平均輝度値は、-10です。
したがって、映像補正部666bは、平均輝度値-10に基づいて、撮影映像の輝度値を補正します。
平均輝度値が0よりも小さい値である場合、補正映像データは、撮影映像データよりも高い輝度値を有します。一方、平均輝度値が0よりも大きい値である場合、補正映像データは、撮影映像データよりも小さい輝度値を有します。
平均輝度値が0よりも小さくなればなるほど、補正映像データの輝度値と撮影映像データの輝度値との差は増加します。また、平均輝度値が0よりも大きくなればなるほど、補正映像データの輝度値と撮影映像データの輝度値との差は、増加します。
図示されていませんが、[式1]ではなく[式2]を満たす「差引輝度データDF」の数が”しきい値”よりも大きい場合、「差引輝度データ」における平均輝度値は、0よりも大きくなります。このような場合、補正映像データは、撮影映像データよりも小さい輝度値を有します。
本発明の野球ゲームシステムは、屋外に設置されることもあり得ます。屋外の照度は、自然光の影響を受けます。自然光の明るさは、照度計によって測定できます。屋外に設置された野球ゲームシステムを図7を参照しつつ説明します。
図7は、本発明の野球ゲームシステムの他の例の概略的な斜視図です。
 【図7】
【図7】
他の例の野球ゲームシステム100は、図7に示すように、ピッチング部700、撮影部430、プロジェクター555、位置検出部666、第1の打席241、第2の打席242、ホームプレート230、および、照度測定部707を備えます。
照度測定部707では、撮影部430の撮影領域の照度を測定します。照度測定部707は、第1の照度計707bまたは第2の照度計707aの少なくとも1つを有します。
第1の照度計707bは、第1の打席241と第2の打席242との間に設置できます。図示されていませんが、第1の照度計707bは、ホームプレート230に設置することもできます。例えば、ホームプレート230の中心部にホール(孔)を形成し、このホール(孔)に第1の照度計707bを入れておくこともできます。第1の照度計707bは、ホール(孔)を介して撮影領域の照度を測定できます。
第2の照度計707aは、ホームプレート230の上方に設置できます。このとき、第2の照度計707aは、プロジェクター555と撮影部430との間に設置できます。
位置検出部666では、撮影部430から撮影映像が提供され、照度測定部707で測定された照度に基づいて撮影映像の輝度を調整して、補正映像を生成します。また、補正映像に基づいて、投球されたボールや打撃されたボールの位置を検出します。
照度測定部707で測定された照度が基準照度よりも低い場合、補正映像の輝度値は、撮影映像よりも高くなります。また、照度測定部707で測定された照度が基準照度よりも高い場合、補正映像の輝度値は、撮影映像よりも低くなります。
なお、照度測定部707で測定された照度が基準照度と同じ場合、補正映像は生成されません。具体的には、位置検出部666は、補正映像ではなく撮影映像に基づいて、投球されたボールや打撃されたボールの位置を検出します。
このようにすれば、上述したような複雑な演算処理は、必ずしも必要ありません。
なお、図7のピッチング部700、撮影部430、プロジェクター555、第1の打席241、第2の打席242、および、ホームプレート230は、前述した図1および図2と同様です。
ここがポイント!
上記の通り、本発明は、照度の変化に関係なく、常にボールの位置を正確に判断できる野球ゲームシステムを提供します。
本出願で特許となった本発明のポイントを解説しますと、本発明は、主に、投球されたボールや打撃されたボールの位置を正確に検出するための演算処理方法に特徴がある野球ゲームシステムです。
本発明の野球ゲームシステムは、ストライクゾーンを含む判定領域に向かってボールを投球するピッチング部を備えます。また、判定領域とピッチング部との間に設置された撮影部を備えます。
さらに、投球されたボールや打撃されたボールの位置を検出する位置検出部を備えます。位置検出部には、撮影部で撮影された撮影映像が提供されます。そして、位置検出部では、撮影映像の輝度値が基準映像よりも小さい場合には、撮影映像の輝度を増加させて補正映像を生成し、一方、撮影映像の輝度値が基準映像よりも大きい場合には、撮影映像の輝度を減少させて補正映像を生成して、補正映像に基づいてボールの位置を検出します。
本発明の野球ゲームシステムによれば、設置場所が屋外または屋内のいずれかであり明るくても暗くても、投球されたボールや打撃されたボールの位置を補正できるため、ボールの位置を正確に検出できます。
何に活用されているの?
本特許は、韓国の「クラウドゲート」という会社から出願されたものです。この会社は、シミュレーションゴルフシステムの開発やオンラインゲームの開発経験を持っていて、その技術を基にして体験型野球ゲームシステムである「レジェンド野球ゾーン」という事業を始めたようです。本特許発明は、まさにこの「レジェンド野球ゾーン」に利用されていると思われます。なお、ゲームグラフィックの制作などおこなっている“クラウドゲート株式会社”という日本の会社は、本特許の特許権者とは直接的な関係はないようです。
本特許の発明は、体験型野球ゲームシステムをさらに進化させるために考え出されたアイデアであると思われます。日本と同様に野球人気が高い韓国の企業ならではの視点で、野球ゲームシステムの演算処理精度をさらに高めようという思いが本発明へつながったと思われます。
特許の概要
|
発明の名称 |
野球ゲームシステム |
|
出願番号 |
特願2016-179480 |
|
公開番号 |
特開2017-221629 |
|
特許番号 |
特許第6294424号 |
|
出願日 |
平成28年9月14日 (2016.9.14) |
|
公開日 |
平成29年12月21日(2017.12.21) |
|
登録日 |
平成30年2月23日 (2018.2.23) |
|
審査請求日 |
平成28年9月14日 (2016.9.14) |
|
出願人 |
クラウドゲート コープ.(韓国) |
|
発明者 |
ジャン ソンモク |
|
国際特許分類 |
A63B 71/06 |
|
経過情報 |
・本願は、1度拒絶理由通知書を受けたあとに、補正することによって特許となりました。 |
 【図:カメラアダプタ120の処理シーケンス(通常時)】
【図:カメラアダプタ120の処理シーケンス(通常時)】

 【図1】
【図1】 【図2】
【図2】