消火訓練

VRでリアリティあふれる消火体験シミュレーション
会社や学校、または地域の自治体などで、消火訓練を行うことは全国で広く行われています。
消防署の協力の元、室内を模したセットを組んで、実際に火災を発生させて消火器を使って火を消し止めるといった訓練に、実際に参加された方も多いのではないでしょうか。
しかし、このようなセットを組んだり、また、実際に火をつけたりすることは、大掛かりでコストがかかるばかりでなく、専門家の指導の元で行うことが前提となっている点で、訓練参加者の世代等を問わずに、誰でも手軽に消火体験ができるというものではありませんでした。
そこで、VR(仮想現実)空間に炎を発生させ、これを実際の空間の映像(実景)と組み合わせることによって、実際に手に持った消火器のホース先端から、仮想の消火剤が噴射され、仮想空間内にある炎を鎮火させるという、まったく新しい消火体験シミュレーションが可能となりました。従来、VR技術は仮想空間に没入することを主目的としていましたが、実景とVRを組み合わせることによって、現実感を損なうことなく、実際の消火活動の手順を、臨場感を持って体験することができるようになったのです。また、この消火体験に必要なものは消火器(模型でOK!)とヘッドマウントディスプレイのみなので、室内で手軽に、かつ安全に消火訓練を実施できるというわけです。これならオフィスや学校でも、効果的な消火訓練ができそうですね。
■従来の課題
従来、消火訓練シミュレータは、大がかりな設備を必要としていました。
例えば、トラック等の荷台に室内のセットを用意し、実際に火災を発生させて、炎に消火剤を投入できるように設置されたものがあります。しかし、専門家向けであり簡便に体験できず、手軽に利用できませんでした。これに対して、近年、VR(仮想現実)の技術を利用した消火訓練シミュレータが考え出されています。しかし、このシミュレータは、あくまでも仮想現実(VR)空間のなかで実施するものであり、実際の道具を使用して体験しながら経験できるものではありません。
そこで、従来よりも簡便に利用でき、臨場感を伴って実際の消火活動の手順を体験できる消火体験シミュレーションシステムが要望されています。
本発明は、上記の要望に鑑みてなされたものであり、実際の消火活動の手順が臨場感をもって体験できる、VRを用いた消火体験シミュレーションシステムを提供することを目的とします。
■本発明の効果
本発明は、VRを用いた消火体験シミュレーションシステム、体験用消火器、及びプログラムに関するものです。本発明では、実際の消火器に似た体験用消火器と、ヘッドアップディスプレイ(HMD)とを使用して、例えば室内であっても、実際の消火活動と同じ手順で消火体験を経験するこができます。
■特許請求の範囲のポイントなど
本発明の特許請求の範囲における概要を説明しますと、本発明のVRを用いた消火体験シミュレーションシステムは、
・体験者に装着されるヘッドマウントディスプレイ(HMD)と、
・HMDのコントローラ機能を兼ねる体験用消火器と、を備えます。
本発明の全体構成を説明するために、特許請求の範囲に記載された「消火体験シミュレーションシステム」について説明します。
■全体構成
本発明の「消火体験シミュレーションシステム」は、上述しましたように、
・ヘッドマウントディスプレイ(HMD)と、
・体験用消火器と、を備えます。
ヘッドマウントディスプレイ(HMD)は、映像を表示するディスプレイと、コンピュータと、通信処理を行う通信部と、実景を撮像する実景撮像用カメラと、を有します。
体験用消火器は、HMDとの間で通信を行う通信部と、消火器本体と、操作レバーと、仮想現実の消火剤を先端から噴出させるホースと、操作レバーの動きを検出する第1のセンサと、ホースの先端の動きを検出する第2のセンサと、を有します。
なお、HMDのコンピュータは、HMDの操作を制御するようにはたらきます。また、体験用消火器の操作レバーは、HMDが仮想現実(VR)表示モードであるときに、仮想現実の消火剤を噴射するスイッチとして機能します。
上記コンピュータの制御は、実映像表示モード/仮想現実表示モードを切り換えるように機能します。実映像表示モードのときには、HMDのカメラで撮像した実映像をHMDのディスプレイに表示させる実映像と、仮想現実映像との切換機能を有します。
また、上記コンピュータの制御は、実映像表示モードから仮想現実映像表示モードに切り換わると、体験用消火器のホースの先端から仮想現実の消火剤が噴射されるシミュレーション映像と、仮想現実の炎が鎮静されるシミュレーション映像と、を表示させる仮想現実映像生成機能を有します。
このシミュレーション映像は、
・体験用消火器の第1のセンサ(操作レバーの動きを検出)の検出情報と、
・第2のセンサ(ホースの先端の動きを検出)の検出情報と、を基にして表示されます。
本発明には、上記の「消火体験シミュレーションシステム」において使用される「体験用消火器」と、上記ヘッドマウントディスプレイ(HMD)のコンピュータを作動させる「プログラム」も含まれています。
■細部
本発明の特許請求の範囲には、以下のような内容の発明も記載されています。
上記コンピュータの制御において、実映像/仮想現実映像切換機能は、実映像表示モードでの操作レバーの動きを第1のセンサで検出した後に、実映像表示モードの実行を終了するように設計されています。すなわち、仮想現実の消火剤を噴射すると、実映像表示モードから仮想現実映像表示モードに切り換わって、仮想現実映像で消火体験を実行するように設計されています。
さらに、下位概念の発明として、本発明の特許請求の範囲には、以下のような発明も記載されています。
HMDの通信部との間で通信できる(大きい)モニターを別途設けます。このモニターは、体験者がHMDのディスプレイで見ている映像を表示します。このモニター映像は、実映像の映像データと、仮想現実映像の映像データとを基にして表示されます。
上記コンピュータ制御の仮想現実映像生成機能は、好ましくは以下のように設計されています。
実映像表示モードから仮想現実映像表示モードに切り換えたときに、仮想現実空間に消火活動前の火災映像を表示させます。続いて、消火活動前の火災映像が体験者に近寄ってきて止まり、その後、消火活動のシミュレーション映像を表示させ、炎が鎮静化されて小さくなると、消火活動によって小さくなった炎の映像がさらに近寄ってきて止まるように設計されています。
また、消火活動前や消火活動のシミュレーション映像の背景映像に、体験者が見渡すことができるパノラマ映像を表示させるように設計されています。
上記コンピュータ制御は、好ましくは以下のように設計されています。
仮想現実空間における消火活動が終了した後、体験者の消火活動を所定の基準に従って評価し、評価を示す情報をHMDのディスプレイに表示させる機能をさらに有します。
このような発明を実施するための具体例について、以下に説明します。
■実施形態
図1(A)は、VR(仮想現実)を用いた消火体験シミュレーションシステムの基本的な構成例を示します。図1(B)は、VRを用いた消火体験シミュレーションにおける消火活動例を示します。
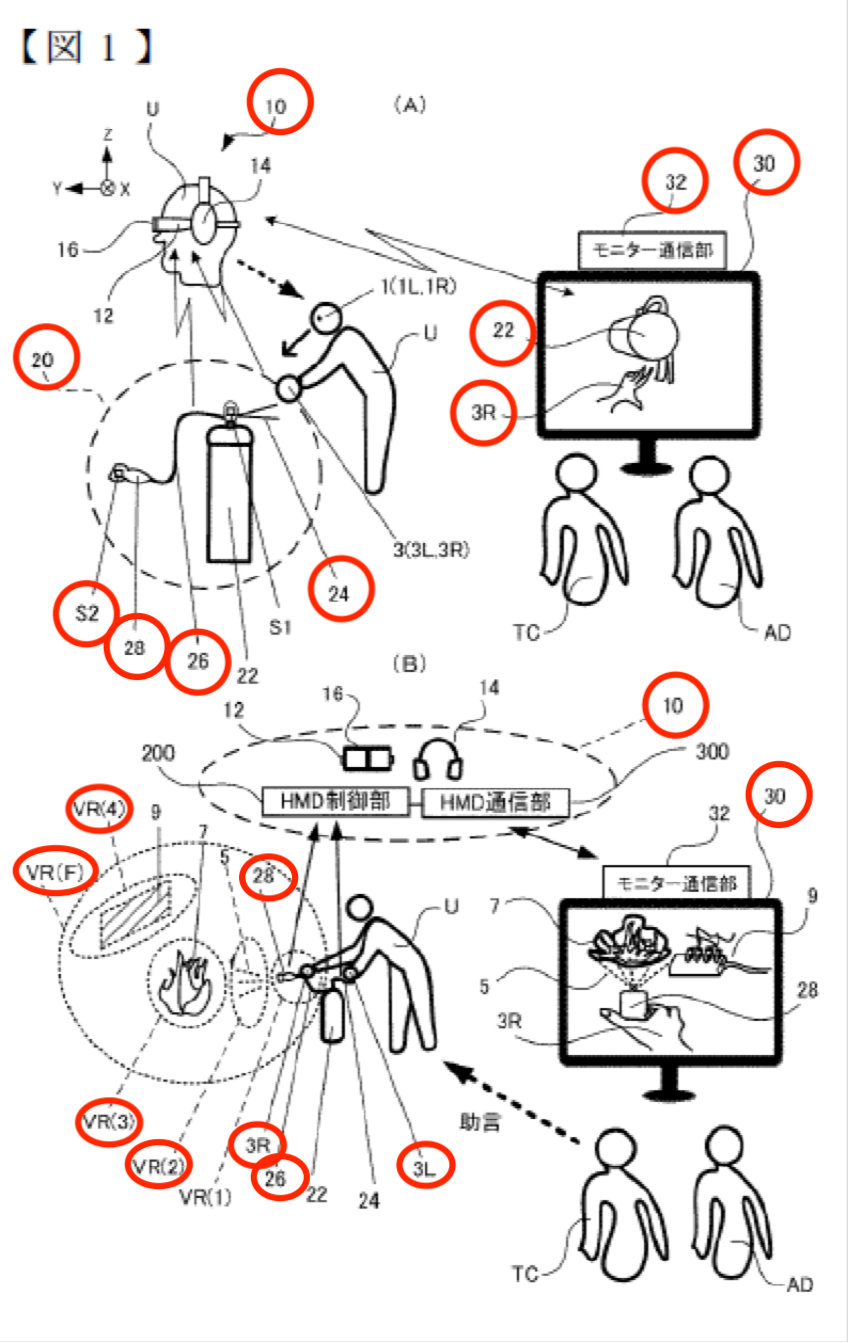
図1(A)の左下側に示されるように、HMD10用のコントローラを兼ねる体験用消火器20が、予め用意されています。
この体験用消火器20は、
・HMD10の通信部(第1の通信部)との間で通信を行う通信部と、
・消火器本体22と、
・HMD10が仮想現実(VR)表示モードであるときに、仮想現実の消火剤を噴射するスイッチとして機能する操作レバー24と、
・仮想現実の消火剤5を先端から噴出させる噴出具として機能するホース26と、
・体験者Uによる操作レバー24の操作を検出する第1のセンサS1と、
・ホース26の先端28の動きを検出する第2のセンサS2と、を備えています。
訓練用消火器20は、HMD10用のコントローラとして機能し、また、実際の消火器操作の体験用具としても機能します。
図1(A)の右側に示されるように、体験者Uの近くに設置されたモニター30は、図1(B)に示すごとく、HMD10の通信部(第1の通信部)との間で通信を行う通信部(第3の通信部)32を備えています。なお、モニター30は、画像処理装置を搭載しています。
モニターの画像処理装置は、体験者UがHMD10のディスプレイを通じて見る映像を表示します。この映像は、HMD10が実映像表示モードであるときの実映像の映像データと、仮想現実映像表示モードであるときの仮想現実映像の映像データとを基にして入力され、HMD10の通信部(第1の通信部)及びモニター30の通信部(第3の通信部)32を経由して入力されます。図1(A)の例では、体験者Uが見ている体験用消火器20の実映像、及び、体験者Uの左手の手首付近の実映像が映し出されています。
図1(A)の例では、消火活動の指導者TCも、順番待ちをしている体験希望者ADも、モニター30の画像を見ています。これによって、多くの人が、体験者Uと同じ映像を通して、同じ経験を共有できます。従って、消火活動の指導者TCが、体験者Uに、適宜、助言を与えることができます。また、観衆ADが、叫び声をあげるなどして、現実感ある演出も可能となります。
消火器本体22や自身の手(右手3R)の映像(実映像)を体験者が確認した後、図1(B)へと移行し、実映像表示モードから仮想現実表示モードへと切り換えられます。
図1(B)で示すように、VRを用いた消火体験シミュレーションが開始されます。HMD10が、実映像表示モードから仮想現実映像表示モードに切り換えられると、下記の複数画像を重ね合わせた画像合成によって、仮想現実表示のためのフレーム映像VR(F)を生成します。
・体験者Uの手に握られたホース26の先端28を含む映像VR(1)
・ホース26の先端28から仮想現実の消火剤5が噴射される映像VR(2)
・仮想現実の炎7が鎮静される映像VR(3)
・背景対象物9(例えば、火元となるタコ足配線)を含む背景映像VR(4)
また、生成したフレーム映像VR(F)映像をHMD10のディスプレイに表示させます。これと併行して、体験者Uが見ている映像を映像モニター30に映し出します。
図1(A)、(B)に示されるように、本実施形態のVR(仮想現実)を用いた消火体験シミュレーションシステムでは、体験用消火器20(HMD10のコントローラを兼ねる)が実際の消火器と似ています、よって、実際の消火活動と同様の操作(レバー24の操作やホース26の先端28の操作)を、体験者U自身の手3(左手3L、右手3R)で行うことができます。従って、体験者Uは、実際の消火器の操作に慣れることができます。
また、すぐに仮想現実空間に入り込むのではなく、図1(A)に示されるように、まず、実映像をディスプレイに表示し、訓練用消火器20と手(右手3R)の位置等を確認した後、仮想現実(VR)空間での消火活動シミュレーションを開始することができます。
従って、現実の感覚を体験しつつ、実際の消火活動と同じ手順で、消火作業を行うことができます。体験者Uは、実際の消火活動の臨場感を持ちながら消火体験できます。
図2(A)~(D)は、それぞれ、ホースの先端から噴射する消火剤の方向を変化させる例を示します。体験者は、ホースの先端を握る手の手首の支点を固定し、支点を中心として手首を回動させます。
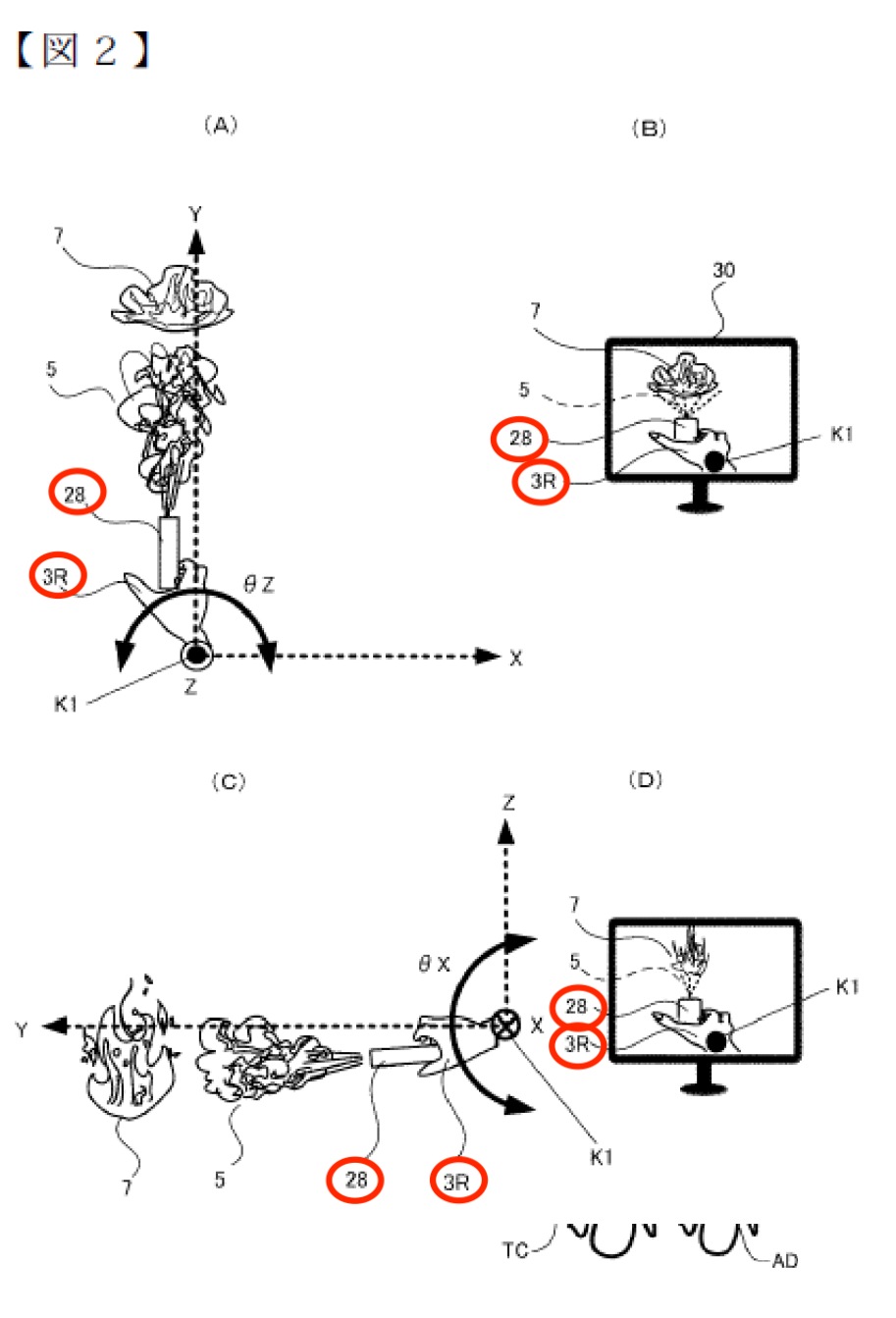
図2(A)は、右手3Rと、ホース26の先端28と、ホース26の先端28から噴出される仮想現実の消火剤5と、仮想現実の炎7とを、仮想現実空間において上から見たときの画像を示します。図2(B)は、そのVR画像がモニター30に映し出されている様子です。
図2(A)、(B)の例で示されるように、仮想現実空間では右手3Rの手首の支点K1の位置が固定されています。仮に、実際の右手3Rがさまざまな方向へ動いたとしても、仮想現実空間でその動きは反映されず、常に、支点K1は同じ位置にあります。図3(A)の例では、体験者Uから見て左右方向の横回動だけが、体験用消火器20のセンサS2によって検出されます。また、例えば図2(C)に示すように、同様に上下方向の縦回動だけが体験用消火器20のセンサS2によって検出できます。これによって、画像処理の負担の軽減など、仮想現実映像生成機能の負担を減らすことができます。
次に、図3(A)~(D)に沿って、VRを用いた消火体験の手順例、仮想現実の炎の見える位置等について説明します。

図3(A)では、HMD10を装着した体験者Uが、まず、体験用消火器20から安全ピン13を引き抜きます。次に、一方の手(ここでは右手3R)をレバー24に掛け、他方の手(ここでは左手3L)でホース26の先端28を保持します。レバーを握りしめていないので第1のセンサS1の検出信号はオフ状態です。
図3(A)の状態では、ゴーグルとして機能するモバイル端末16は、カメラで撮像した実映像を表示するため、体験者Uは、体験用消火器20や手の位置等を自分の眼を通して確認することができます。
続いて、図3(B)に示すように、HMD10が、実映像表示モードから仮想現実映像表示モードへと切り換えられます。ゴーグル部分が黒く表示されています。例えば、仮想現実空間に、火元となっているタコ足配線9の映像が表示されます。このとき、体験者Uから炎7までの距離はL0です。その後、その映像が体験者Uの側に近寄ってきて止まり、体験者Uから炎7までの距離はL1(L1<L0)となり、短くなります。
このように、火元の映像を体験者Uに近づけさせます。仮に、前後方向の動きが考慮されないと、炎までの距離感をつかみにくいのです。この点を考慮し、仮想現実空間における火元の映像を、適切なタイミングで体験者Uに近づけて、体験者Uが炎に向かって歩を進めたような感覚を得ることができるように設定されています。実映像表示モードから仮想現実映像表示モードに切り換わったときに、すぐに消火活動を開始させるのではなく、火元の映像を体験者Uに近づけることで、消火剤5が炎に届く距離まで近づくことが重要である、という消火活動の基本を体験者Uが学べます。
続いて、図3(C)に示すように、消火活動のシミュレーション映像が表示されます。仮想現実空間内において、消火剤5の噴射によって、炎7が鎮静化される様子を示す映像が表示されます。
最後に、図3(D)に示すように、炎7が鎮静化されて小さくなると、小さくなった炎を含む消火活動後の映像が、体験者Uに、さらに近寄って止まります。ある程度まで炎が鎮静化されたタイミングで、火元映像を近づけることで、油断せずに最後まで確実に炎を消すことが重要である、という基本を学ぶことができます。やがて、炎は完全に鎮火され、体験シミュレーションが終了します。
■展望、結語
以上ご説明しましたように、本発明のVRを用いた消火体験シミュレーションシステム、体験用消火器、及びプログラムによって、臨場感を伴って実際の消火活動の手順を体験できることができます。上述したような工夫が詰め込まれた本発明は、大掛かりな設備がなくても簡便に実施できることから、将来的に注目できるものです。
■概要
出願国:日本 発明の名称:VRを用いた消火体験シミュレーションシステム、体験用消火器、及びプログラム
出願番号:特願2017-128155(P2017-128155)
特許番号:特許第6410378号 (P6410378)
出願日:2017年6月30日
公開日:2019年1月24日
登録日:2018年10月05日
出願人:MXモバイリング株式会社
経過情報:2度の拒絶理由通知書を受け、補正手続きを経たうえで特許査定となり、特許料が支払われて、特許となりました。
その他情報:本権利は抹消されていません。存続期間満了日は2037年6月30日です。
IPC:G09B
<免責事由>
本解説は、主に発明の紹介を主たる目的とするもので、特許権の権利範囲(技術的範囲の解釈)に関する見解及び発明の要旨認定に関する見解を示すものではありません。自社製品がこれらの技術的範囲に属するか否かについては、当社は一切の責任を負いません。技術的範囲の解釈に関する見解及び発明の要旨認定に関する見解については、特許(知的財産)の専門家であるお近くの弁理士にご相談ください。