
未来のサービスを今、あなたのテーブルへ

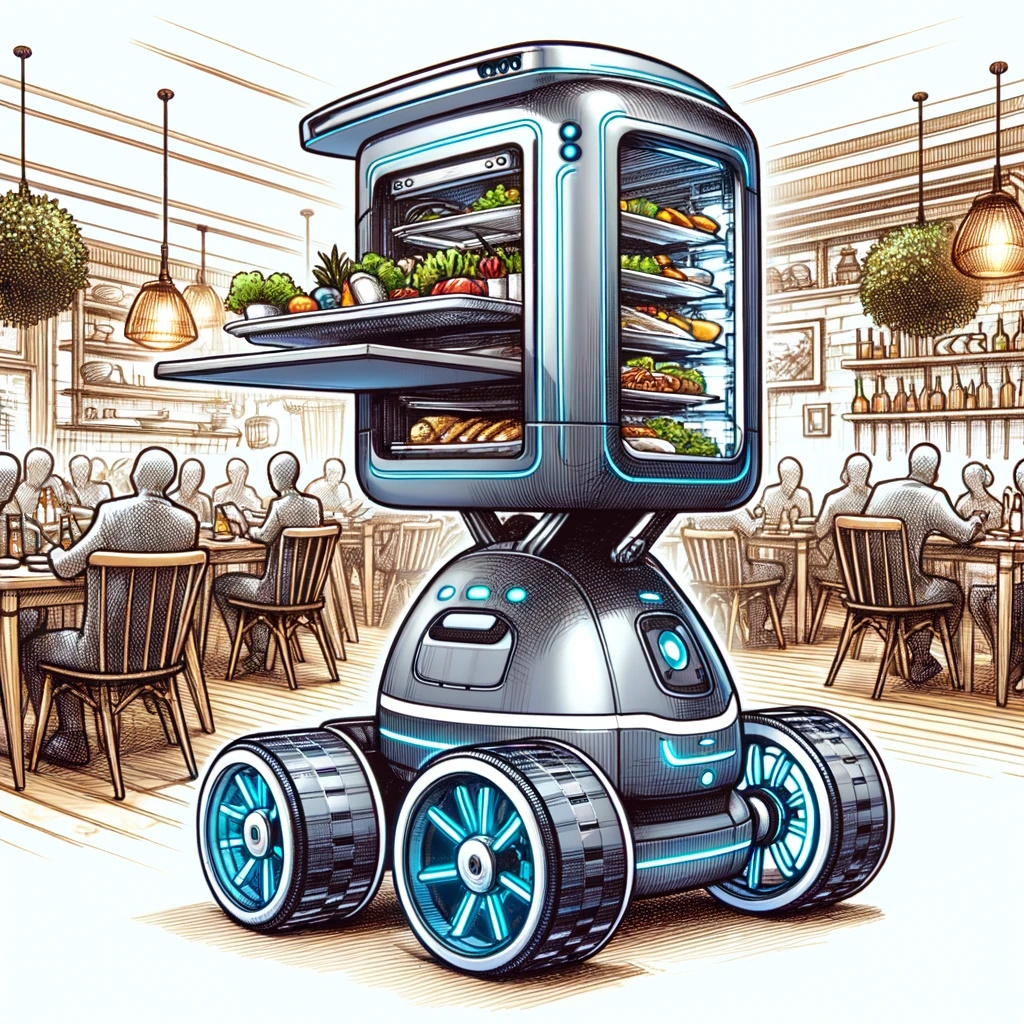
最近、ファミリーレストランなどで、料理を配膳してくれるロボットが活躍していることに気づかれているでしょうか。このロボットは、レストランのフロアを緩やかに動き、最適なルートで料理を運んでくれます。このようなロボットを全国のレストランに展開するためには、動作の正確性や安定性はもちろんのこと、メンテナンス性も優れている必要があります。
今回紹介する発明は、レストランのサービスをレベルアップするための食事サービングロボットについてです。どのような特許技術があるのでしょうか。
発明の背景
一般に、ロボット開発における主な課題はいくつかの側面にわたって広がっています。まず第一に、動作の安定性が挙げられます。安定性はロボットの基本的な要件であり、特に移動中に重要となります。この安定性は駆動輪群と自在輪群の配置に大きく依存しており、これによりロボットが均衡を保ちながら効果的に移動できるようになります。
次に、機動性も重要な課題となります。ロボットは特定の方向に自由に移動できる能力を持つ必要があります。これは自在ホイールセットの設計に関連しており、特定の回転制限を持つように設計された自在ホイールセットによって、ロボットは特定の方向に自由に移動できるようになります。
また、メンテナンスの利便性も重要な課題です。ロボットのメンテナンスは簡単で効果的である必要があります。これは輪郭や取り付け構造の設計に関連しており、効果的な取り付け構造を持つように設計されたロボットは、メンテナンスが容易になります。
さらに、保護構造も重要な課題となります。ロボットの部品は適切に保護される必要があり、これは保護ハウジングの設計に関連しています。保護ハウジングはロボットの部品を保護し、長寿命を保証します。
最後に、コスト効率も重要な課題です。ロボットの設計は製造コストを節約しながらも効果的な性能を提供する必要があります。これは賢明な設計と材料選定によって達成されることが多く、ロボットの開発者は高品質なロボットを低コストで提供する方法を常に探求しています。
どんな発明?
発明の目的
この発明の目的は、自在ホイールセットを有するロボットを提供することです。このロボットは、移動安定性を保証し、自由に操舵することを実現できます。具体的には、シャーシ構造が2つの駆動輪とフレーム、そして2つの自在ホイールセットを含むロボットを提供します。
この自在ホイールセットは第一ストッパ、第二ストッパ、自在ホイール、および取り付け構造を含みます。自在ホイールは取り付け構造に回転可能に設置され、第一ストッパと第二ストッパは自在ホイールに近接して設置されます。
自在ホイールは第一ストッパと接触するまで回転し、第一限界位置で停止します。また、自在ホイールは第二ストッパと接触するまで回転し、第二限界位置で停止します。この設計により、ロボットの移動安定性が保証され、自由に操舵することが可能になります。
発明の詳細
それでは、図面も参照しながら、本発明の詳細について説明していきます。
 【図1】
【図1】
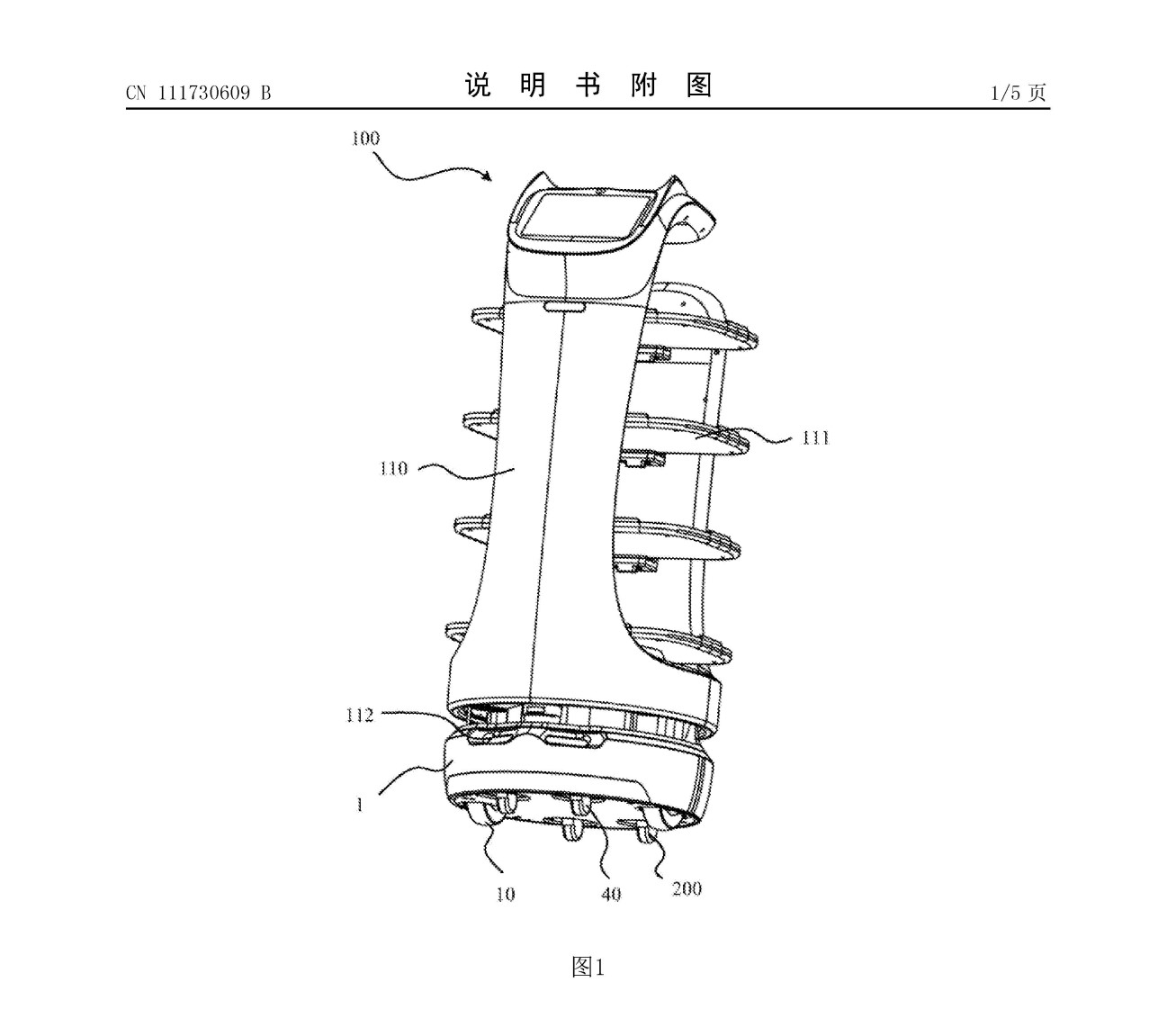
図1(および図2から図5)は、本発明の実施形態に関連する自在ホイールセットを有するロボット100を示しています。このロボットは配送タスクを実行するために使用することができます。
ロボット100はシャーシ構造1を含み、このシャーシ構造は以下の要素から構成されます:
2つの駆動ホイールセット10
フレーム30
2つの自在ホイールセット200
自在ホイールセット200はさらに以下の要素を含みます(図2も参照):
第一ストッパ210
第二ストッパ220
自在ホイール230
取り付け構造240
自在ホイール230は取り付け構造240に回転可能に設置され、第一ストッパ210と第二ストッパ220はキャスタ230に近接して設置されます。自在ホイール230は第一ストッパ210と接触するまで回転し、第一限界位置で停止します。また、自在ホイール230は第二ストッパ220と接触するまで回転し、第二限界位置で停止します。
このシステムは、ロボットの移動安定性を保証し、自由に操舵することを可能にします。
 【図2】
【図2】
2つの自在ホイールセットと2つの駆動ホイールセットはフレームの両側に設置されます。この設計により、ロボットは安定して移動することが可能となります。
 【図4】
【図4】
 【図5】
【図5】
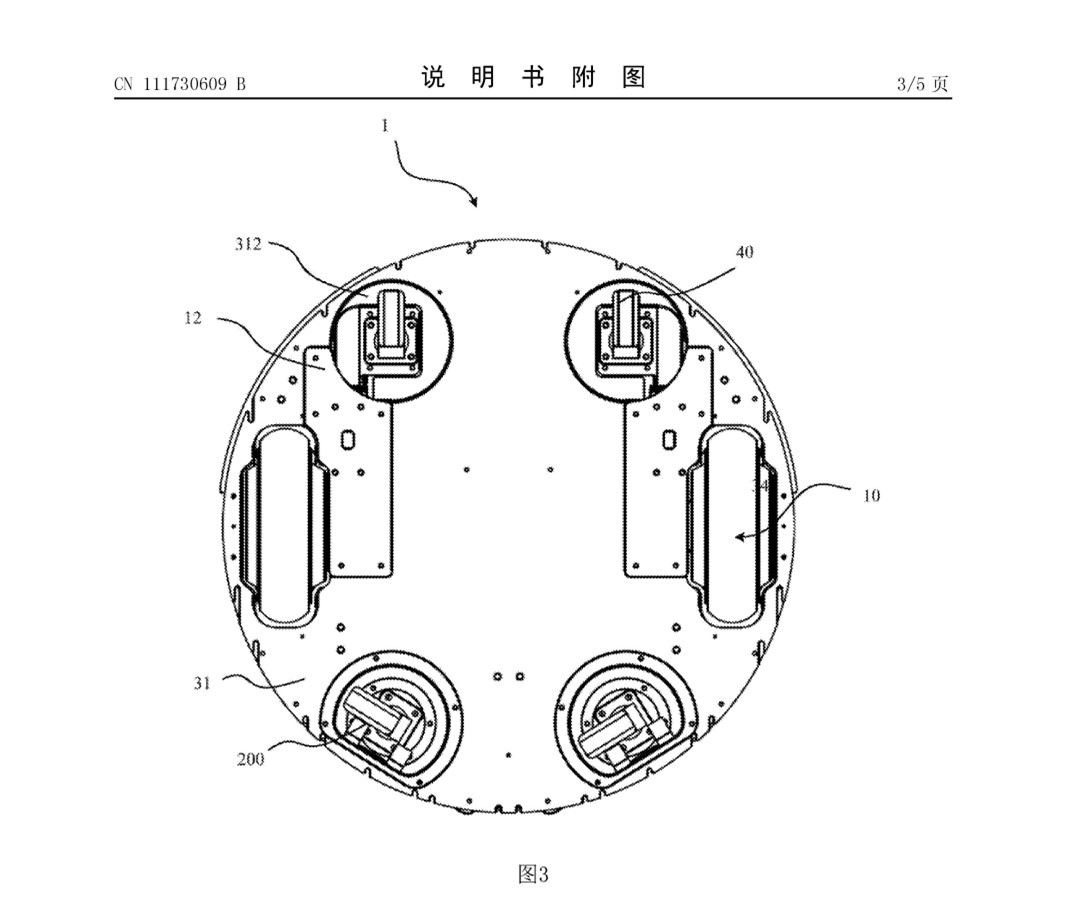
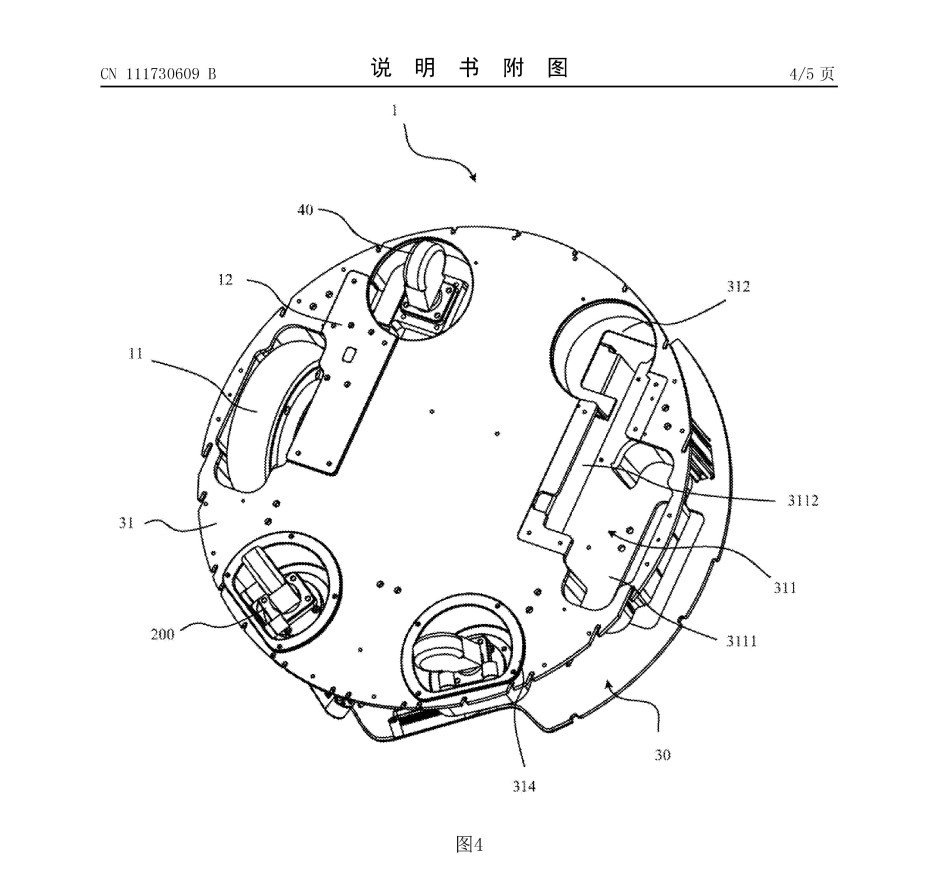
図3から図5に示すように、底板31に駆動輪取付溝311が設置されます。駆動輪群10は駆動輪11及び前記駆動輪11に固定的に接続されるロック部材12を含みます。前記駆動輪11は前記駆動輪取付溝311に設置されます。ロック部材12は底板31の外部に固定されます。この場合、底板の外部からロック部材を取り外し、それにより駆動輪を駆動輪取付溝とシャーシから分離し、駆動輪群を着脱すること(つまり交換すること)が簡単になります。
ロボットのシャーシ構造については、次のようにまとめることができます。
底板31には、駆動輪取付溝311が2つあり、それぞれが第一溝3111と第二溝3112を含んでいます。これらの溝は連通しており、同じ延伸方向を持っています。
駆動輪11は第一溝3111に設置され、緩衝構造13は駆動輪11に接続され、第二溝3112から貫通できるように設計されています。これにより、緩衝構造と駆動輪を一体化し、メンテナンスの利便性を向上させることが可能になります。
緩衝構造13の寸法は第二溝3112の寸法よりも小さくなければなりません。
ロック部材12は板部材を含み、緩衝構造13はこの板部材に固定されます。この板部材は第二チャネル3112を覆い、底板31と係止することで、緩衝効果を実現します。
制振構造にはバネが含まれています。
シャーシ構造1はさらに2つのホイールセット40を含み、これによりメンテナンスの利便性が向上します。
底板31には2つのキャスタ取付溝314があり、保護ケース250はこれに設置され、外部から固定されることで、駆動輪群と自在輪群のメンテナンスの利便性が向上します。
ここがポイント!
この特許発明はロボット技術の分野における革新的な自在ホイールセットを提供しています。このシステムは、ロボットの移動安定性を保証し、自由に操舵することを可能にする新しい自在ホイールセットを導入しています。特に、自在ホイールの回転角度を制限することで、ロボットの回転自由度を保証し、安定性を向上させることが可能です。
この設計は、底板中心を回転軸として自転する能力をロボットに付与し、自在車輪と駆動輪群との間の距離を増加させることで移動過程の安定性を高めます。また、自在車輪群を底板の縁部に配置することで、ロボットの安定性がさらに向上します。
この技術は特に、自律的に料理の配布などのタスクを実行する食事ロボットに有用であり、メンテナンスの利便性も向上させています。
未来予想
この特許技術が広く採用されることで、未来の食事配布システムは大きく変革される可能性があります。自律的な食事サービングロボットは、病院、高齢者ホーム、学校、企業のカフェテリアなど、さまざまな施設での食事配布を効率化し、人間の労力を大幅に削減することができます。
高度に安定した移動システムを持つこれらのロボットは、狭い通路や混雑したエリアでもスムーズに移動できるため、配布時間を短縮し、サービスの質を向上させることができます。また、自在ホイールセットの採用により、ロボットは障害物を避けながら効率的なルートを選択できるようになります。
さらに、メンテナンスの利便性が向上することで、ロボットのダウンタイムが減少し、長期的な運用コストも削減されます。これにより、施設は人件費の削減だけでなく、ロボットのメンテナンスに関連するコストも削減できるようになります。
未来の社会では、このようなロボットが家庭にも導入され、家庭内のタスクを支援する可能性もあります。例えば、高齢者が自宅で安心して生活できるよう、食事を運んだり、家事を助けたりするロボットが普及するかもしれませんね。
特許の概要
|
発明の名称 |
自在車輪を備えたロボット |
|
出願番号 |
CN202010368440.8 |
|
特許番号 |
CN111730609B |
|
出願日 |
2020/4/30 |
|
登録日 |
2021/12/14 |
|
出願人 |
深圳市普渡科技有限公司 |
|
発明者 |
王远志 等 |
| 国際特許分類 |
B25J 11/00 |
| 経過情報 |
中国以外へのファミリー出願なし |
 【図1】
【図1】 【図2】
【図2】 【図3】
【図3】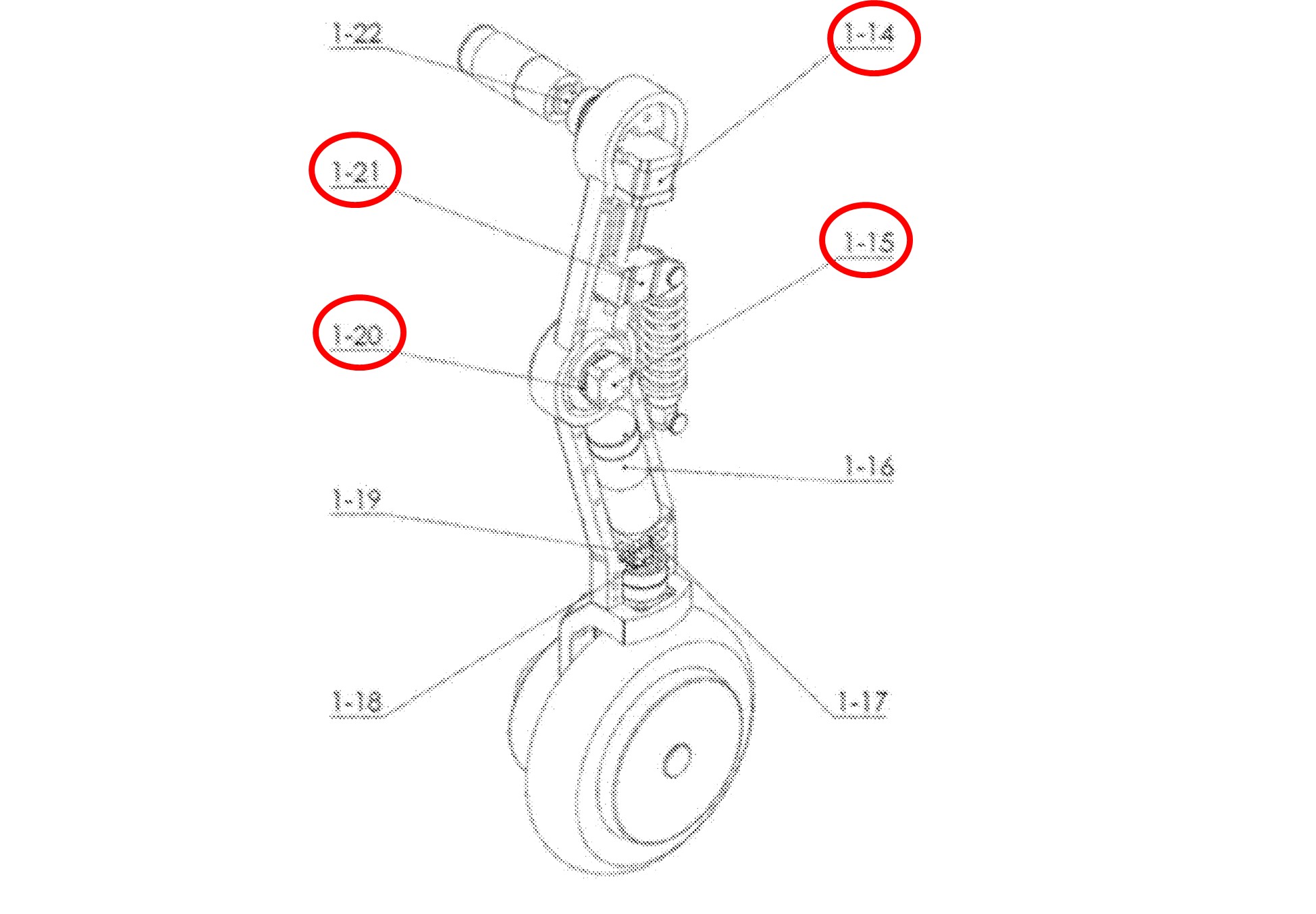 【図4】
【図4】 【図1】
【図1】 【図2】
【図2】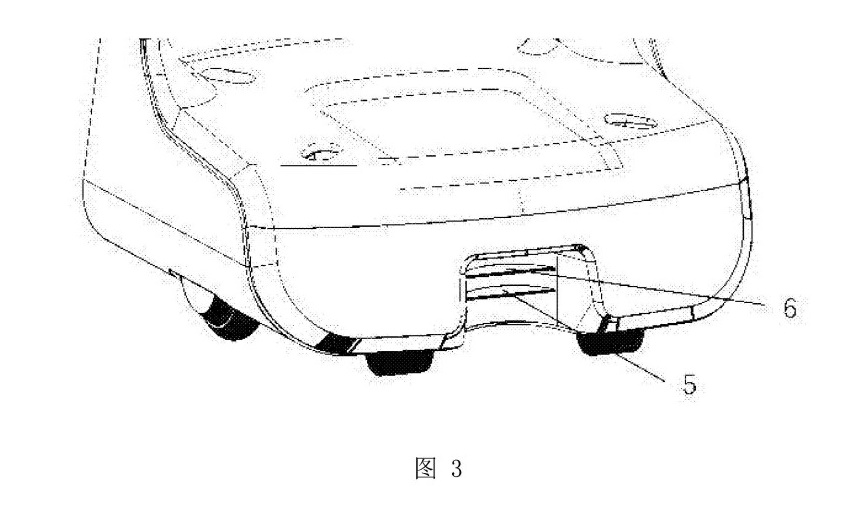 【図3】
【図3】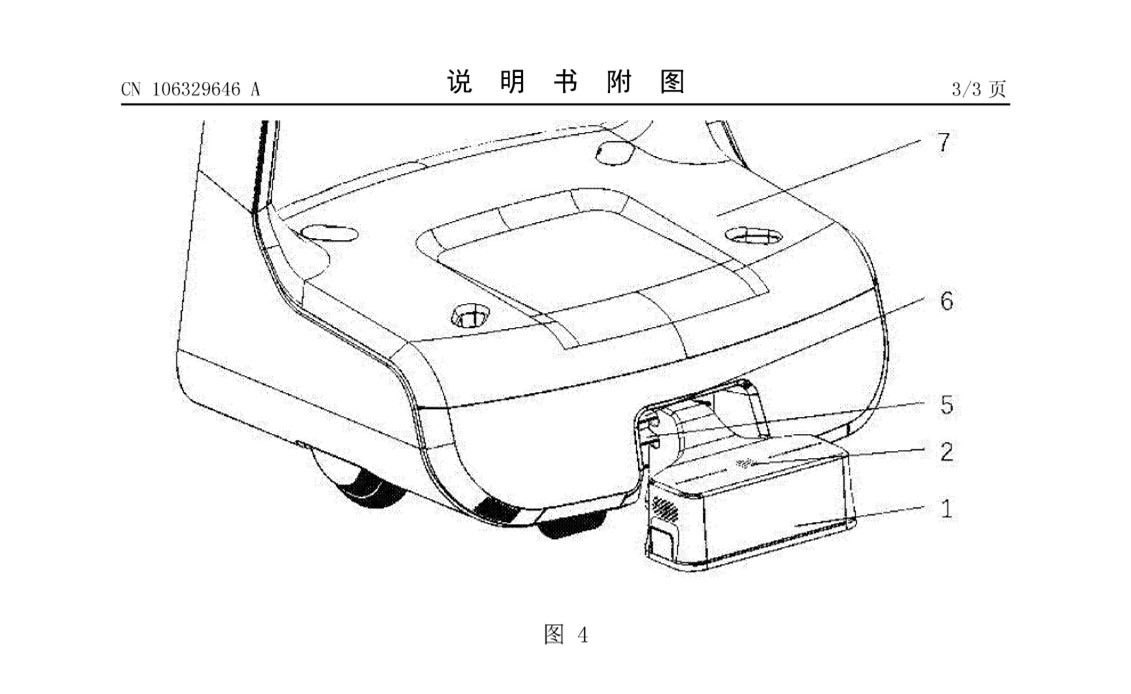 【図4】
【図4】