

自動運転技術を搭載した車は、一部で実用化されていることは、皆さんもよくご存知のことと思います。そして、すでにライドシェア技術の一環として、乗り捨てられた自動運転車両が、所定の返却場所まで自動で戻る技術は2015年に国際特許出願されています(お掃除ロボットが自動で充電ステーションに戻っていくようなイメージです)。
今回紹介する発明は、日本を代表する自動車メーカーであるトヨタ自動車による特許発明です。自動運転技術を応用することによって、カーシェアリング後に乗り捨て可能で、かつ、確実に返却先である駐車場が空いているエリアをユーザーに知らせることを特徴としたものです。これにより、例えば、カーシェアリングのユーザーによって、乗り捨て可能エリア以外へ自動運転車両を乗り捨てられるという事態を防止でき、確実に車両の返却ができることになります。
このような技術が広く実用化すれば、今よりもっとカーシェアリングが手軽となり、利用者が増えるばかりでなく、路上駐車などの迷惑行為が減っていくことが期待できそうです。では、この特許技術について、詳説していきます。
発明の背景
ご存じのように、人間が運転しなくても自動運転で走行する車両(自動車)の開発が進められています。一般公道で自動運転できるようになるには、もう少し時間が必要ですが、自動運転に関する技術開発は、次々と生み出されています。
本発明は、特に自動運転車両をカーシェアリングする場合に利用できる技術です。
従来、自動運転車両管理システムに関する技術として、乗り捨てられた自動運転車両が所定の返却場所まで自動で戻るライドシェア技術が知られています。
しかし、上記のような技術では、例えば返却場所が満車となっている場合に、返却場所の周辺に自動運転車両が乗り捨てられると、自動運転車両が返却場所に駐車できないため、自動運転車両の返車処理が滞ってしまいます。
どんな発明?
発明の目的
上記のような問題点から、自動運転車両に乗ったユーザに対して、乗捨て可能エリアに関する情報を提供でき、乗捨て可能エリアで自動運転車両を乗り捨てられるシステムが要望されています。特に、自動運転車両の走行可能距離に応じた適切な乗捨て可能エリアに関する情報を提供できるシステムが要望されています。
本発明は、このような問題点を解決できる新規な自動運転車両管理システムに関します。
発明の詳細
本発明の自動運転車両管理システムの具体例について、以下に説明します。
図面を参照して、例示的な実施形態について説明します。なお、以下の説明において、同一又は相当要素には同一符号を付し、重複する説明は省略します。
[第1実施形態]
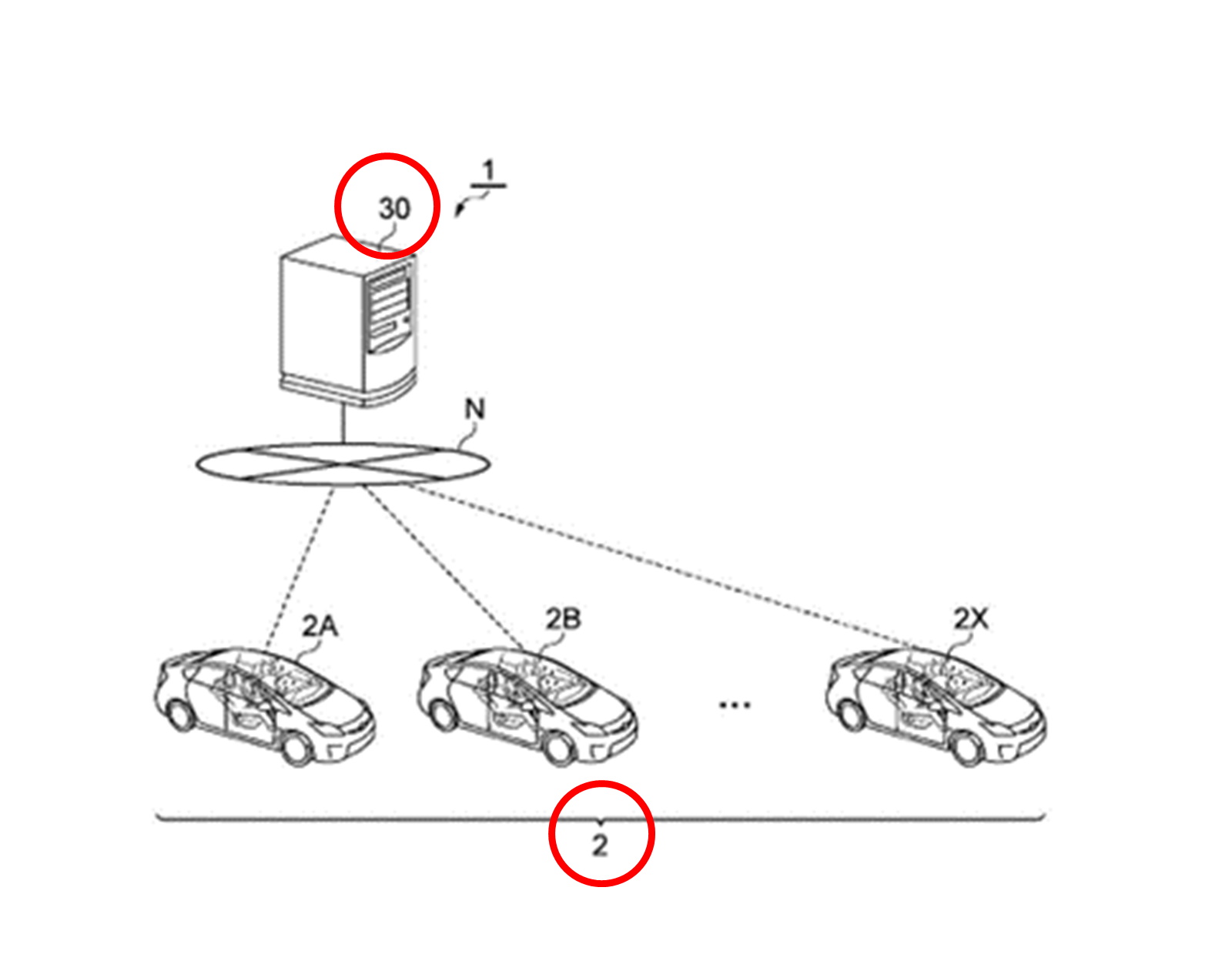
図1は、第1実施形態に係る自動運転車両管理システムの一例を示します。
自動運転車両管理システム1は、自動運転可能な自動運転車両をユーザに提供するためのシステムです。ユーザとは、自動運転車両の提供(配車)を受ける自動運転車両管理システム1の利用者です。
[自動運転車両管理システムの概要]
図1に示されるように、自動運転車両管理システム1は、サーバ30を備えています。サーバ30は、例えば、複数箇所に設けられたサーバ又はコンピュータから構成され、ネットワークNを介して、複数の自動運転車両2A,2B,…,2Xと通信可能に構成されています。ネットワークNは、無線通信ネットワークです。
 【図1】
【図1】
自動運転車両2A,2B,…2Xは、自動運転車両管理システム1にあらかじめ登録されています。自動運転車両2A,2B,…2Xには、車両を識別するID(車両識別番号)が割り振られています。自動運転車両2A,2B,…2Xの数は特に限定されません。以下、自動運転車両2A,2B,…2Xの代表として自動運転車両2を挙げて説明を行います。
自動運転車両2は、例えばあらかじめ設定された地点に向かって、自動で車両を走行させる自動運転機能を有し、運転者が運転操作を行わなくても自動で走行します。自動運転車両2は、自動運転機能を実現するための各種センサ、カメラ、動作機構(アクチュエータ)等の構成を備えます。
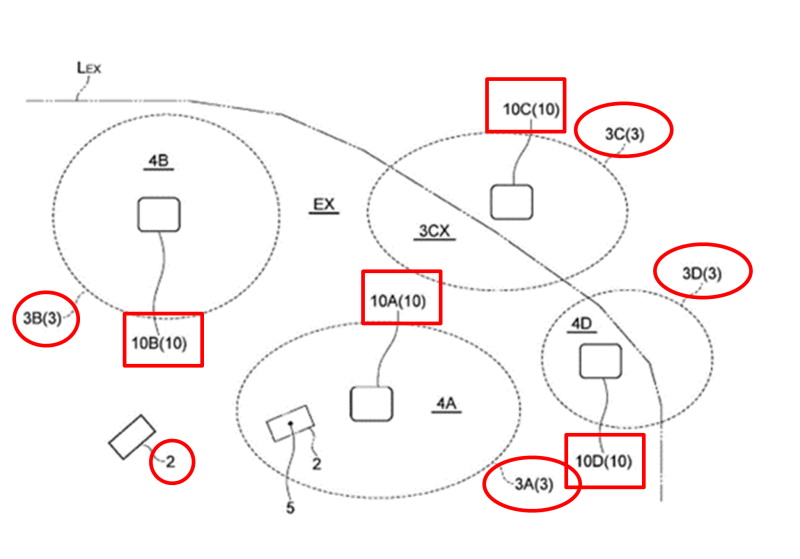
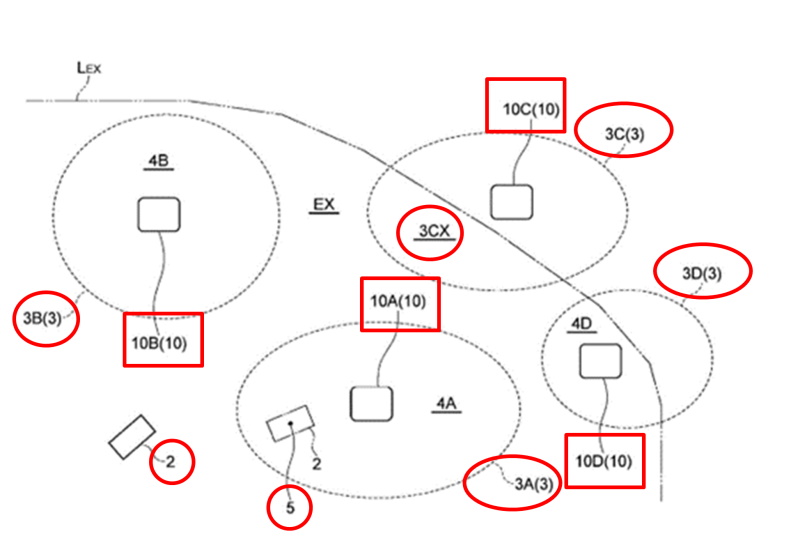
図2は、複数の自動運転許容エリアの一例を示しています。図2に示されるように、自動運転車両管理システム1では、自動運転車両2は、複数の自動運転許容エリア3で自動運転可能です。例えば図2では、自動運転許容エリア3は、自動運転車両2の自動運転での走行が許容されたあらかじめ設定されたエリアであり、4つの自動運転許容エリア3A,3B,3C,3Dを含みます。
自動運転許容エリア3は、自動運転システムが設計どおりに動作する範囲であり、自動運転システムの動作範囲[ODD:operation design domain]に相当します。なお、自動運転車両2は、自動運転許容エリア3の外では手動運転で走行可能です。
 【図2】
【図2】
駐車ステーション10は、自動運転車両2の配車および返車の拠点として機能する駐車設備です。複数の駐車ステーション10と、複数の自動運転許容エリア3とは、それぞれ関連付けられています。
例えば図2では、駐車ステーション10は、4つの駐車ステーション10A,10B,10C,10Dを含み、それぞれの場所で1台又は2台以上の自動運転車両が駐車可能です。
[自動運転車両管理システムのハードウェア構成]
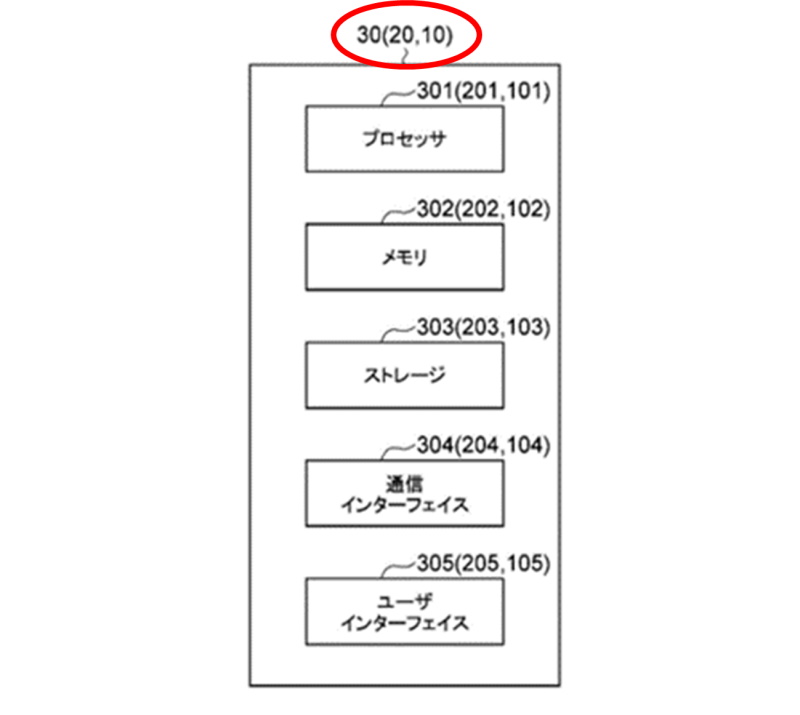
図3は、自動運転車両管理システムの構成要素のハードウェア構成例を示します。
図3に示されるように、例えばサーバ30(図1の30)は、プロセッサ301、メモリ302、ストレージ303、通信インターフェース304およびユーザインターフェース305を備えた一般的なコンピュータです。
 【図3】
【図3】
図3に示されるように、サーバ30のプロセッサ301は、CPUなどの演算器です。メモリ302は、ROMやRAMなどの記憶媒体です。ストレージ303は、HDD(ハードディスク)などの記憶媒体です。通信インターフェース304は、データ通信を実現する通信機器です。ユーザインターフェース305は、液晶やスピーカなどの出力器、および、タッチパネルやマイクなどの入力器です。
プロセッサ301は、メモリ302、ストレージ303、通信インターフェース304およびユーザインターフェース305を統括し、サーバ30の機能を実現します。
図3に示されるように、自動運転車両2はECU[Electronic Control Unit]20を備えます。ECU20は、上述したサーバ30と同様に、プロセッサ201、メモリ202、ストレージ203、通信インターフェース204およびユーザインターフェース205を備えます。自動運転車両2は、GPS受信機を備える場合があります。
図3に示されるように、駐車ステーション10は、駐車ステーション10における予約システムを運用するための処理装置(例えばコンピュータ)を備えています。駐車ステーション10の処理装置は、上述したサーバ30およびECU20と同様に、プロセッサ101、メモリ102、ストレージ103、通信インターフェース104およびユーザインターフェース105を備えます。
[自動運転車両管理システムの機能的構成]
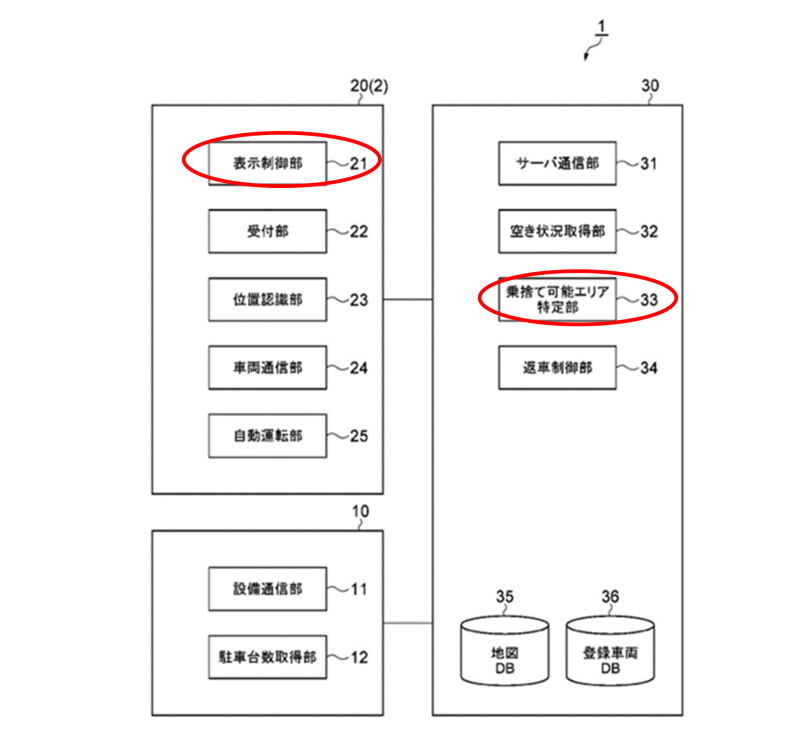
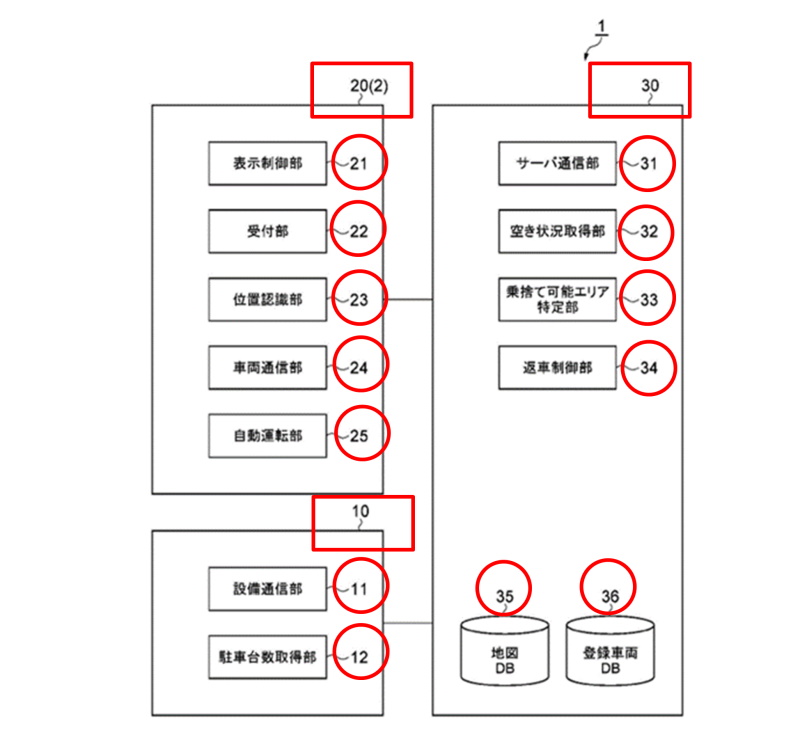
図4は、自動運転車両管理システムの機能の一例を示すブロック図です。図4は、システムの機能を概念的に示しています。
図4に示されるように、駐車ステーション10は、設備通信部11および駐車台数取得部12を備えます。
図4に示されるように、自動運転車両2のECU20は、表示制御部(情報提供部)21、受付部22、位置認識部23、車両通信部24、および自動運転部25を備えます。
図4に示されるように、サーバ30は、サーバ通信部31、空き状況取得部32、乗捨て可能エリア特定部33、返車制御部34、地図DB35、および登録車両DB36を備えます。
これらの詳細については、後に詳しく説明します。
ここで、自動運転車両2のユーザからの返車要求に基づいて、サーバ30によって自動運転車両2の返車を管理するしくみについて説明します。特に「乗捨て可能エリア特定部33」のはたらきについて詳しく説明します。また、「表示制御部21」で表示される表示例についても説明します。
 【図4】
【図4】
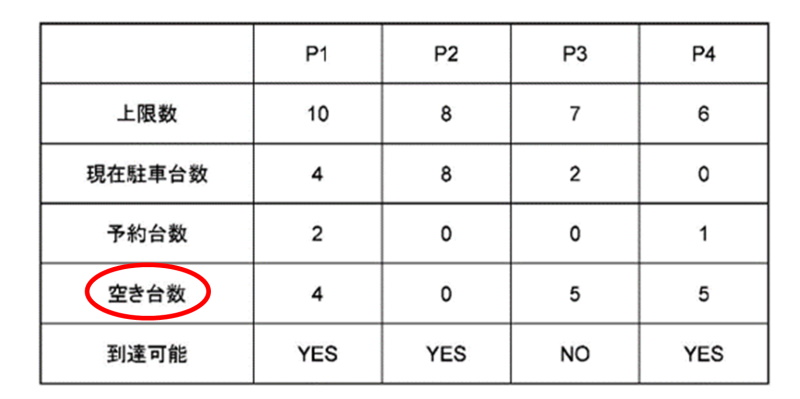
図5は、乗捨て可能エリアにおける現在駐車台数や空き台数などの例を示します。
図5の例では、P1,P2,P3,P4は、駐車ステーション10がサーバ30からの現在駐車台数の問い合わせを受信したときの駐車ステーション10A,10B,10C,10Dについての情報にそれぞれ対応しています。
 【図5】
【図5】
図2および図5に示されるように、乗捨て可能エリア特定部33は、乗捨て可能エリアを特定するために、例えば、空き台数と走行可能距離情報とに基づいて、返車地点5に乗り捨てられた自動運転車両2が駐車ステーション10に到達可能か否かを判定します。返車地点5は、ユーザが自動運転車両2の利用を終えて、自動運転車両2が駐車ステーション10に返却可能となる自動運転許容エリア3内の地点です。
 【図2】
【図2】
図2に示す駐車ステーション10Aの場合、図5のP1で示すように、上限数が10台であり、現在駐車台数が4台であり、予約台数が2台であることから、空き台数は、4台です。よって、乗捨て可能エリア特定部33は、駐車ステーション10Aにある自動運転許容エリア3Aを、乗捨て可能エリアの候補として特定します。また、自動運転車両2は、自動運転許容エリア3Aの全域に相当する領域4Aにおけるどの地点からも駐車ステーション10Aに到達可能です。
よって、乗捨て可能エリア特定部33は、領域4Aを乗捨て可能エリアとして特定します。
図2に示す駐車ステーション10Bの場合、自動運転車両2は、自動運転許容エリア3Bの全域に相当する領域4Bにおけるどの地点からも駐車ステーション10Bに到達可能です。しかし、駐車ステーション10Bでは、図5のP2で示すように、空き台数が0台です。よって、乗捨て可能エリア特定部33は、領域4Bを乗捨て可能エリアの候補として特定しません。
図2に示す駐車ステーション10Cの場合、図5のP3で示すように、空き台数が5台です。よって、乗捨て可能エリア特定部33は、自動運転許容エリア3Cを乗捨て可能エリアの候補として特定します。しかし、自動運転車両2は、自動運転許容エリア3Cのうち、自動運転車両2が到達可能な地点の集合に相当する領域3CX内の地点(図2をご参照)からは、駐車ステーション10Cに到達することができません。
よって、乗捨て可能エリア特定部33は、領域3CXを乗捨て可能エリアとして特定しません。具体的な一例として、図2の二点鎖線LEXよりも自動運転車両2側の領域3CXを図示します。
図2に示す駐車ステーション10Dの場合、空き台数が5台です。よって、乗捨て可能エリア特定部33は、駐車ステーション10Dにある自動運転許容エリア3Dを乗捨て可能エリアの候補として特定します。また、自動運転車両2は、自動運転許容エリア3Dのうち自動運転車両2が到達可能な地点の集合に相当する領域4D内の地点から、駐車ステーション10Dに到達できます。よって、乗捨て可能エリア特定部33は、領域4Dを乗捨て可能エリアとして特定します。
そして、乗捨て可能エリア特定部33は、特定した乗捨て可能エリアに関する情報をユーザに提供します。乗捨て可能エリア特定部33は、サーバ通信部31を介して、乗捨て可能エリアに関する情報を自動運転車両2に送信します。
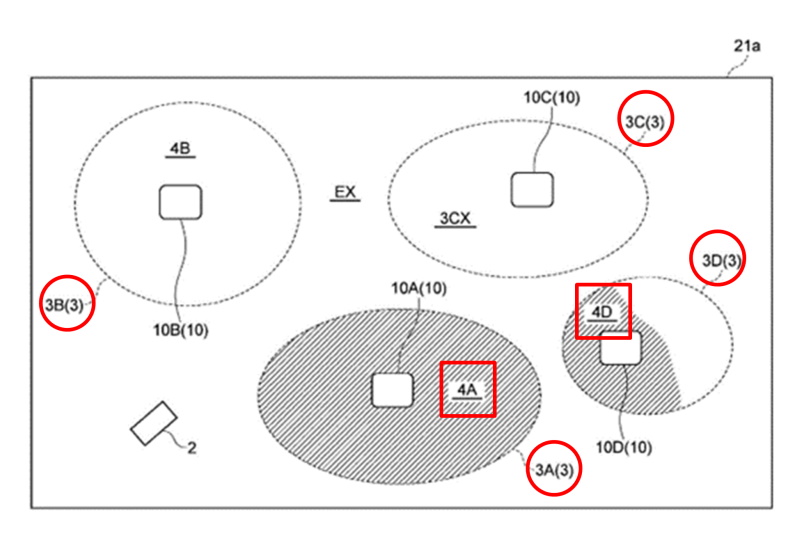
乗捨て可能エリア特定部33は、例えば、地図上に乗捨て可能エリアを表示した画像を表示制御部21に表示させることで、乗捨て可能エリアに関する情報をユーザに提供します。
図6は、乗捨て可能エリアの表示例を示します。図6に示されるように、表示制御部21は、例えば、自動運転許容エリア3A、3B,3C,3Dを図5と同様の位置関係で示しつつ、領域4A,4D(図6中ハッチングを付した部分)を乗捨て可能エリアとして示すような画像を表示器21aに表示させます。
 【図6】
【図6】
図2および図5の例において、乗捨て可能エリア特定部33は、例えば、特定した複数の乗捨て可能エリア(領域4A,4D)のうち、空き台数が多い方(領域4D)を強調させた画像を表示制御部21に表示可能です。
または、乗捨て可能エリア特定部33は、例えば、特定した複数の乗捨て可能エリア(領域4A,4D)のうち、自動運転車両2からの距離が近い方(領域4A)を強調させた画像を表示制御部21に表示可能です。
なお、乗捨て可能エリアは、法的に自動運転車両2の駐車又は停車が禁止されていないエリア(例えば駐車場)です。乗捨て可能エリアは、例えば、駐車場内に設けられた自動運転車両2の駐停車用の駐車枠、コンビニエンスストア等の店舗の駐車場、または、自動車専用道路に設けられたパーキングエリア等の駐車場などです。
ここで、図4に戻って詳しく説明します。
 【図4】
【図4】
[駐車ステーション10]
図4に示されるように、駐車ステーション10における設備通信部11は、サーバ30と駐車ステーション10との通信を管理します。設備通信部11は、ネットワークNを介して、サーバ30からの現在駐車台数の問い合わせを受信し、また、現在駐車台数をサーバ30へ送信します。
駐車ステーション10における駐車台数取得部12は、サーバ30からの現在駐車台数の問い合わせが設備通信部11で受信された場合、駐車ステーション10の現在駐車台数を取得します。現在駐車台数とは、返車要求(後述)があったときの駐車ステーション10の収容台数です。
駐車台数取得部12は、例えば、駐車ステーション10における予約システムの予約リストに基づいて、現在駐車台数を取得できます。駐車台数取得部12は、駐車ステーション10に設けられたカメラの撮像画像の画像解析結果に基づいて、現在駐車台数を取得できます。
なお、駐車台数取得部12は、駐車ステーション10に駐車している自動運転車両2から送信されたそれぞれの車両位置の情報に基づいて、現在駐車台数を取得することもできます。
[自動運転車両2のECU20]
図4に示されるように、自動運転車両2のECU20は、表示制御部(情報提供部)21、受付部22、位置認識部23、車両通信部24、および自動運転部25を備えます。
表示制御部21は、自動運転車両2の表示器21a(図6参照)の画面に各種表示を行います。表示器21aとしては、例えば自動運転車両2に設けられたカーナビゲーション装置のタッチパネルディスプレイ等を用いることができます。
表示制御部21は、ユーザが返車要求を行うための表示、乗捨て可能エリア(後述)に関する情報をユーザに提供するための表示、および、ユーザが乗捨て予約申込み(後述)をするための表示などを行います。
受付部22は、自動運転車両2に乗車中のユーザによる操作を受け付けます。受付部22としては、例えば自動運転車両2に設けられたカーナビゲーション装置のタッチパネルディスプレイ、ボタン等を用いることができます。受付部22は、入力部へのユーザによるタッチ入力を受け付けることでユーザの操作を認識します。ユーザの操作には、例えば、ユーザが返車要求を行うための操作、ユーザが乗捨て可能エリアを選択するための操作、または、ユーザが乗捨て予約申込みをするための操作が含まれます。
位置認識部23は、車載のGPS受信部の位置情報および地図情報に基づいて、自動運転車両2の地図上の位置を取得します。
車両通信部24は、自動運転車両2の通信を管理します。車両通信部24は、ネットワークNと接続することで自動運転車両2とサーバ30との通信を行います。車両通信部24は、ネットワークNを介して、ユーザの操作および自動運転車両2の車両位置に関する情報をサーバ30へ送信し、また、乗捨て可能エリアに関する情報をサーバ30から受信します。
自動運転部25は、自動運転車両2の自動運転を実行します。自動運転部25は、自動運転車両2のエンジン、ブレーキ、および操舵などを制御することで自動運転を行います。なお、自動運転部25は、例えば、ユーザによって自動運転許容エリア3外の地点が設定された場合、自動運転を実行しないように構成されています。
自動運転部25は、自動運転車両2の走行可能距離情報を生成します。自動運転部25は、自動運転車両2が走行するためのエネルギーの残量(例えば蓄電量、燃料残量等)に基づいて、一般的な方法によって走行可能距離を算出できます。
[サーバ30]
サーバ30は、上述しましたように、例えばユーザからの返車要求に基づいて、このユーザの自動運転車両2の返車を管理します。
サーバ30のサーバ通信部31は、自動運転車両2と駐車ステーション10とサーバ30との通信を管理し、ネットワークNを介して、ユーザからの返車要求を受信します。返車要求とは、自動運転車両2を乗り捨てて返却するためのユーザによる要求です。返車要求が可能なタイミングは、例えば、自動運転車両2がユーザへ提供される前、または、自動運転車両2の提供を受けたユーザが自動運転車両2に乗車している最中です。
サーバ30の空き状況取得部32は、ユーザからの返車要求がサーバ通信部31で受信された場合に、複数の駐車ステーション10の空き状況を取得します。
空き状況取得部32は、例えば、駐車ステーション10の収容可能な上限数と、返車要求があったときの現在駐車台数とに基づいて、空き台数を算出できます。空き状況取得部32は、サーバ通信部31を介して、駐車ステーション10から受信した現在駐車台数を用いて、駐車ステーション10の空き状況を算出します。
空き状況取得部32は、上述の上限数および現在駐車台数に加えて、例えば、返車要求があったときの駐車ステーション10の予約台数に基づいて、空き台数を算出します。予約台数は、返車要求があったときに駐車ステーション10には収容されていないが、その後駐車ステーション10に収容される予定となっている自動運転車両2の台数です。
サーバ30の乗捨て可能エリア特定部33は、上述した通り、空き状況と自動運転許容エリア3とに基づいて乗捨て可能エリアを特定します。乗捨て可能エリアは、例えば、複数の自動運転許容エリア3のなかから特定されます。乗捨て可能エリア特定部33は、例えば、空き台数が1台以上である空き状況の駐車ステーション10を候補として挙げます。そして、この駐車ステーション10にある自動運転許容エリア3を乗捨て可能エリアの候補として特定します(図2をご参照)。
サーバ30の返車制御部34は、乗り捨てられた自動運転車両2の返車(返却)を制御します。返車制御部34は、例えば、ユーザからの乗捨て予約申込みを受け付けます。
乗捨て予約申込みには、返車地点5の予定となる返車予定地点の情報が含まれます。返車予定地点とは、例えば、ユーザが自動運転車両2の利用を終えた地点又は終える予定である地点です。返車予定地点は、提供された乗捨て可能エリアに関する情報を参考にしてユーザが選択した地点です。
具体的な例では、返車予定地点は、乗車中のユーザが自動運転の目的地として設定する地点です。返車予定地点は、ユーザが自動運転車両2を停車させて自動運転を終了させる操作を行った地点、または、ユーザが自動運転車両2を停車させて自動運転車両2から降車した地点などです。
返車制御部34は、乗捨て予約申込みに返車予定地点の情報が含まれている場合、返車予定地点を返車地点5として認識し、例えば自動運転部25に乗り捨て後の自動運転を実行させます。
なお、ユーザは、必ずしも乗捨て予約申込みをする必要はありません。すなわち、ユーザは、提供を受けた情報を参考にして、乗捨て予約申込みをすることなく、乗捨て可能エリア内で自動運転車両2を乗り捨てることが可能です。この場合、自動運転車両2は、例えば、ユーザが乗捨て可能エリア内で自動運転車両2を乗り捨てた旨の情報と、乗り捨てられた地点の車両位置の情報とを、車両通信部24およびネットワークNを介してサーバ30に送信します。返車制御部34は、乗り捨てた旨の情報がサーバ通信部31で受信された場合、乗り捨てられた地点を返車地点5として認識します。
返車制御部34は、ユーザからの乗捨て予約申込みを受信した場合、又はユーザが自動運転車両2を乗り捨てた旨の情報がサーバ通信部31で受信された場合、駐車ステーション10の予約リストを更新します。返車制御部34は、自動運転車両2の返車処理として、返車地点5で乗り捨てられた自動運転車両2を、自動運転によって、特定の駐車ステーション10まで移動させます。
サーバ30の地図DB35は、地図情報を記憶したデータベースです。地図情報は、道路、道路構造物、建物等の位置情報を記憶したデータです。地図情報には、自動運転許容エリア3の地図上の位置および範囲に関する情報、各駐車ステーション10の位置情報、および、各駐車ステーション10の上述の上限数に関する情報が含まれます。
サーバ30の登録車両DB36は、例えば、各自動運転車両2のIDと、各自動運転車両2の車両位置の情報と、各自動運転車両2の走行計画とを関連付けて記憶します。
[変形例]
以上、本発明の実施形態について説明しましたが、本発明は上述した実施形態に限定されるものではありません。本発明は、上述した実施形態だけでなく、当業者の知識に基づいて種々の変更、改良を施した様々な形態で実施できます。
例えば、サーバ30は、少なくとも機能的構成の1つがクラウドサーバ上に設けられている場合があります。
例えば、サーバ30又は自動運転車両2は、走行可能距離情報を無視して乗捨て可能エリアを特定することもできます。この場合、サーバ30又は自動運転車両2は、空き台数が1台以上であれば、どの自動運転許容エリア3(図5の例では、自動運転許容エリア3A,3C,3D)であっても乗捨て可能エリアとして特定します。
また、ユーザは、自動運転車両の受付部22に代えて、例えば、パーソナルコンピュータ、若しくは、タブレット又はスマートフォンなどの携帯通信端末等を利用して、返車要求および乗捨て予約申込みの入力操作をすることができます。この場合、車両位置の情報として、携帯通信端末の位置情報が用いられます。
上述した実施形態では、情報提供部の一例として表示制御部21を例示しましたが、ユーザに乗捨て可能エリアに関する情報の提供が可能であればよく、例えば、音、音声、その他の報知手段による情報の提供があり得ます。
上述した実施形態では、自動運転車両2の提供を受けて実際に乗車したユーザが返車要求する場合について説明しました。一方、自動運転車両2の提供を受ける前のユーザが、パーソナルコンピュータ、若しくは、タブレット又はスマートフォンなどの携帯通信端末等を利用して、返車要求および乗捨て予約申込みの入力操作をすることも可能です。この場合、例えば、表示制御部21に代えて、パーソナルコンピュータ、若しくは、タブレット又はスマートフォンなどの携帯通信端末等の表示画面に、乗捨て可能エリアに関する情報を表示させます。
図2の例では、複数の自動運転許容エリア3が互いに独立していましたが、複数の自動運転許容エリア3が重複している場合もあります。この場合、乗捨て可能エリア特定部33は、例えば、複数の自動運転許容エリア3の重複領域を乗捨て可能エリアとして特定します。
乗捨て可能エリア特定部33は、例えば、乗捨て予約申込みに含まれる返車予定地点が重複領域内となっている場合、返車予定地点からの距離が近い方の駐車ステーション10にある自動運転許容エリア3を乗捨て可能エリアとして特定します。
ここがポイント!
上記の通り、本発明は、例えば、自動運転車両に乗ったユーザに対して、乗捨て可能エリアに関する情報を提供でき、乗捨て可能エリアで自動運転車両を乗り捨てられる自動運転車両管理システムを提供します。
本出願で特許となった本発明のポイントを解説しますと、特に、自動運転車両の走行可能距離に応じた適切な乗捨て可能エリアに関する情報を提供できる点に特徴があります。
本発明を要約しますと、本発明の自動運転車両管理システムは、複数の自動運転許容エリアで自動運転できる自動運転車両を、ユーザに提供するための自動運転車両管理システムです。
複数の自動運転許容エリアは、それぞれ駐車ステーションを有します。
自動運転車両管理システムは、駐車ステーションの空き状況を取得する空き状況取得部を備えます。また、自動運転車両管理システムは、空き状況取得部で取得した空き状況と、自動運転許容エリアとに基づいて、自動運転車両の乗り捨てが可能な乗捨て可能エリアを特定する乗捨て可能エリア特定部を備えます。
また、自動運転車両管理システムは、乗捨て可能エリア特定部によって特定された乗捨て可能エリアに関する情報をユーザに提供する情報提供部を備えます。
好ましくは、本発明の自動運転車両管理システムは、自動運転車両の車両位置を認識する位置認識部をさらに備えます。
上述した乗捨て可能エリア特定部は、走行中の自動運転車両の走行可能距離情報をさらに取得します。そして、取得した走行可能距離情報、上記の車両位置、空き状況、および、自動運転許容エリアに基づいて、乗捨て可能エリアを特定するように構成されています。
未来予想
本特許は、世界を代表するトヨタ自動車から出願されたものです。ご存じのようにハイブリッド車を開発および販売してきた実績のある会社です。今後は、二酸化炭素を排出しない自動車(電気自動車や水素ガスエンジン車など)の開発に注力すると予想されますが、一方で、自動車の自動運転システムの開発にも注力すると考えられます。
本特許の発明は、自動運転の自動車をより便利に利用するために考え出されたアイデアであると思われます。自動運転のシステム開発分野にも積極的に進出して、自動車に関わるあらゆる新規分野に挑戦しようという意図があるようです。
特許の概要
|
発明の名称 |
自動運転車両管理システム |
|
出願番号 |
特願2019-074167 |
|
公開番号 |
特開2020-173542 |
|
特許番号 |
特許第7088118号 |
|
出願日 |
平成31年4月9日 (2019/04/09) |
|
公開日 |
令和2年10月22日 (2020/10/22) |
|
登録日 |
令和4年6月13日 (2022/06/13) |
|
審査請求日 |
令和3年6月14日 (2021/06/14) |
|
出願人 |
トヨタ自動車株式会社 |
|
発明者 |
岩本 貴之、大瀧 翔 |
| 国際特許分類 |
G08G 1/14 |
|
経過情報 |
・本願は拒絶理由通知を受けることなく特許となりました。 ・本願を基礎出願として、中国やアメリカにも出願されています。中国ではすでに特許となっています。 |
 【図1】
【図1】 【図2】
【図2】 【図3】
【図3】 【図4】
【図4】 【図5】
【図5】 【図6】
【図6】 【図7】
【図7】 【図8】
【図8】 【図1A】
【図1A】 【図2】
【図2】